![]()
THine Value MIPIの長距離化をV-by-One HSで実現、組み込みカメラ用SerDesチップセットの選定を容易化する(Sub-Link編)
2022.08.22
- 記事
- 事例
前回はMain-Linkに関するデザインガイドを紹介したが、今回は制御信号を伝送するSub-Linkに関するデザインガイドを詳しく紹介する。
Sub-Linkとは
まず、Sub-Linkに関する具体的な紹介に入る前にV-by-One® HS 対応トランスミッタIC 「THCV241A」を例としてMain-LinkとSub-Linkの概要をそれぞれ整理したい(図1)。「THCV241A」はカメラ・モジュールから出力されるMIPI® CSI-2信号をV-by-One HS信号に変換するICだが、Main-LinkはそのV-by-One HS信号そのものを伝送する経路を指す。一方で「THCV241A」はそのほかにI2CとGPIO(汎用入出力信号)の制御信号インターフェースを備えており、それらの信号をトランスミッタICとレシーバICの間で相互に受け渡す際に用いられる経路がSub-Linkである。Sub-Linkの機能を使えば、トランスミッタICとレシーバICを通じて画像データを受け渡すだけでなく、SoCからカメラ・モジュールの電源を切ったり、リセットを掛けたり、LEDを点灯させたりするなど、より多様なシステムが実現可能になる。なお、Sub-Linkの機能を使用する際はSub-LinkもMain-Link同様にレシーバICと接続する必要がある。
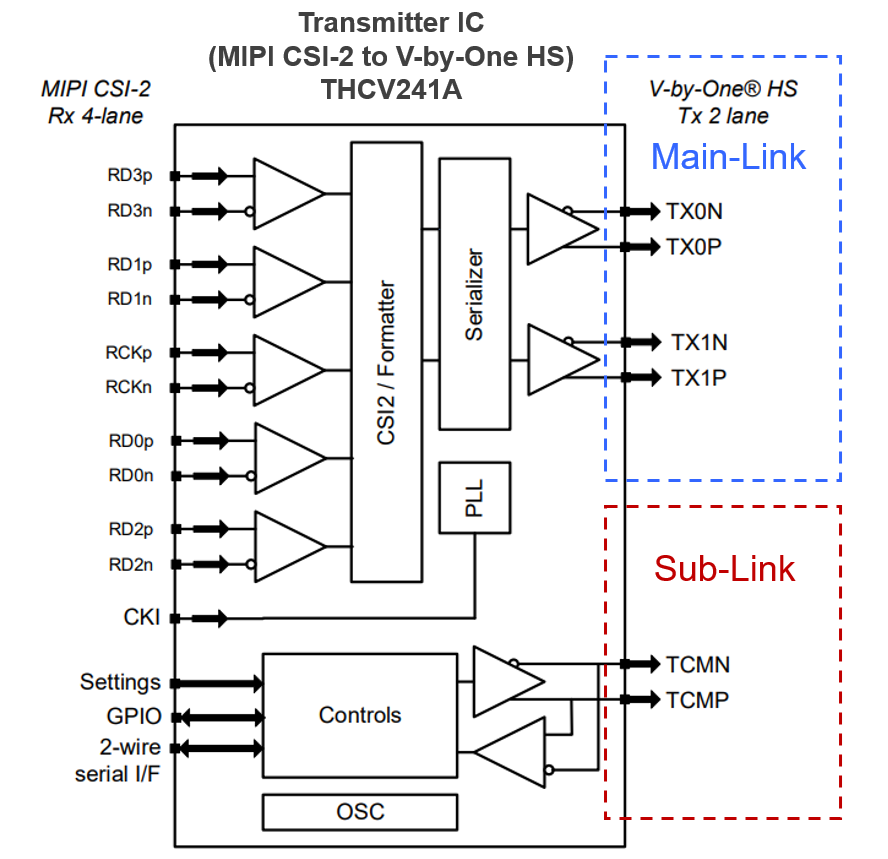
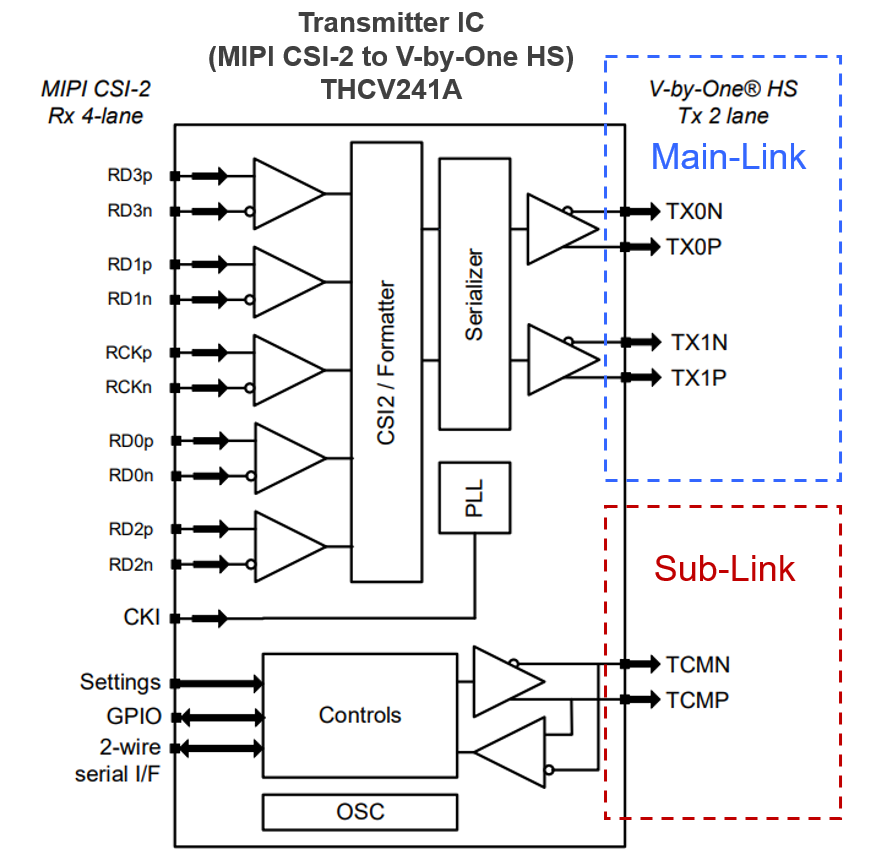
図1 トランスミッタIC THCV241Aのブロック図
Sub-Link:Through GPIOとRegister GPIOを使いこなす
上述の通り、Sub-Linkを通じてI2CやGPIO信号といった信号の受け渡しが可能になるが、そのGPIOの制御方式には、Through GPIOとRegister GPIOの2種類がある。電子機器メーカー(ユーザー)は、この2種類の制御方式を使いこなして最適なシステムを検討しなければならない。
まず、Through GPIOはカメラ・モジュールとSoCの間に入るトランスミッタICとレシーバICを、あたかも存在しないかのように通過させて、SoCからカメラ・モジュールを直接制御する方法である。このためSoCの設定を変えずに、長距離伝送に対応できるというメリットがある。加えて、トランスミッタICとレシーバICはただ単に通過するだけなので、SoCからカメラ・モジュールをリアルタイムで制御することが可能である。
しかし、「THCV241A」と「THCV242A」の組み合わせでは、Through GPIOとして利用できるGPIO端子は最大4本(GPIO0、GPIO1、GPIO2、GPIO3)かつアップストリームとダウンストリームはそれぞれ2本という制約がある(図2)。このため、接続するカメラ・モジュールの個数が増えるなど、GPIO端子を通じて制御したい要素が増えると、Through GPIOのみでは制御が困難になるケースが発生する。
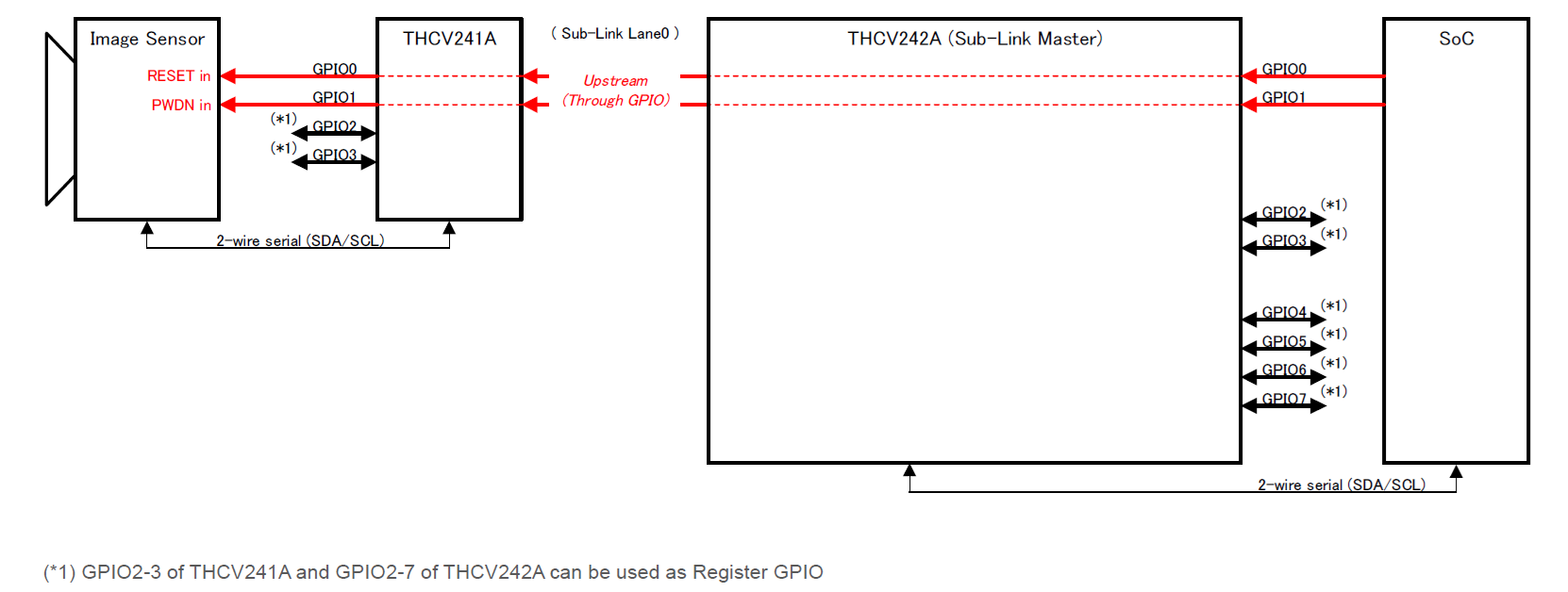
そこで、Through GPIOでカバーできない制御を補うのがRegister GPIOである。Register GPIOは、SoCからI2Cバスを通じてレシーバICおよびトランスミッタICのレジスタを所望のタイミングで書き換えることで、希望する制御を実現するというものである(図3)。これによりThrough GPIOの制約を超えた、より複雑なシステム構成が組めるようになる。
しかしながら、Register GPIOにはThrough GPIOと比べて配慮を要する点が2点ある。1つは、SoCの制御ソフトウェアに対して新たにRegister GPIO制御のための仕様を加える必要があることだ。SoCのタイミングに応じてその都度、I2Cバス経由で各レジスタの内容を書き換えながらGPIO端子を制御しなければならない。もう1つは、リアルタイム性に劣ることである。レジスタを書き換え、その内容に応じてトランスミッタIC/レシーバICが動作するため、レイテンシー(遅延時間)が発生する。システム設計エンジニアは、Through GPIOとRegister GPIOそれぞれの制約と特性を考慮したうえでシステムを検討する必要がある。
まず、Through GPIOはカメラ・モジュールとSoCの間に入るトランスミッタICとレシーバICを、あたかも存在しないかのように通過させて、SoCからカメラ・モジュールを直接制御する方法である。このためSoCの設定を変えずに、長距離伝送に対応できるというメリットがある。加えて、トランスミッタICとレシーバICはただ単に通過するだけなので、SoCからカメラ・モジュールをリアルタイムで制御することが可能である。
しかし、「THCV241A」と「THCV242A」の組み合わせでは、Through GPIOとして利用できるGPIO端子は最大4本(GPIO0、GPIO1、GPIO2、GPIO3)かつアップストリームとダウンストリームはそれぞれ2本という制約がある(図2)。このため、接続するカメラ・モジュールの個数が増えるなど、GPIO端子を通じて制御したい要素が増えると、Through GPIOのみでは制御が困難になるケースが発生する。
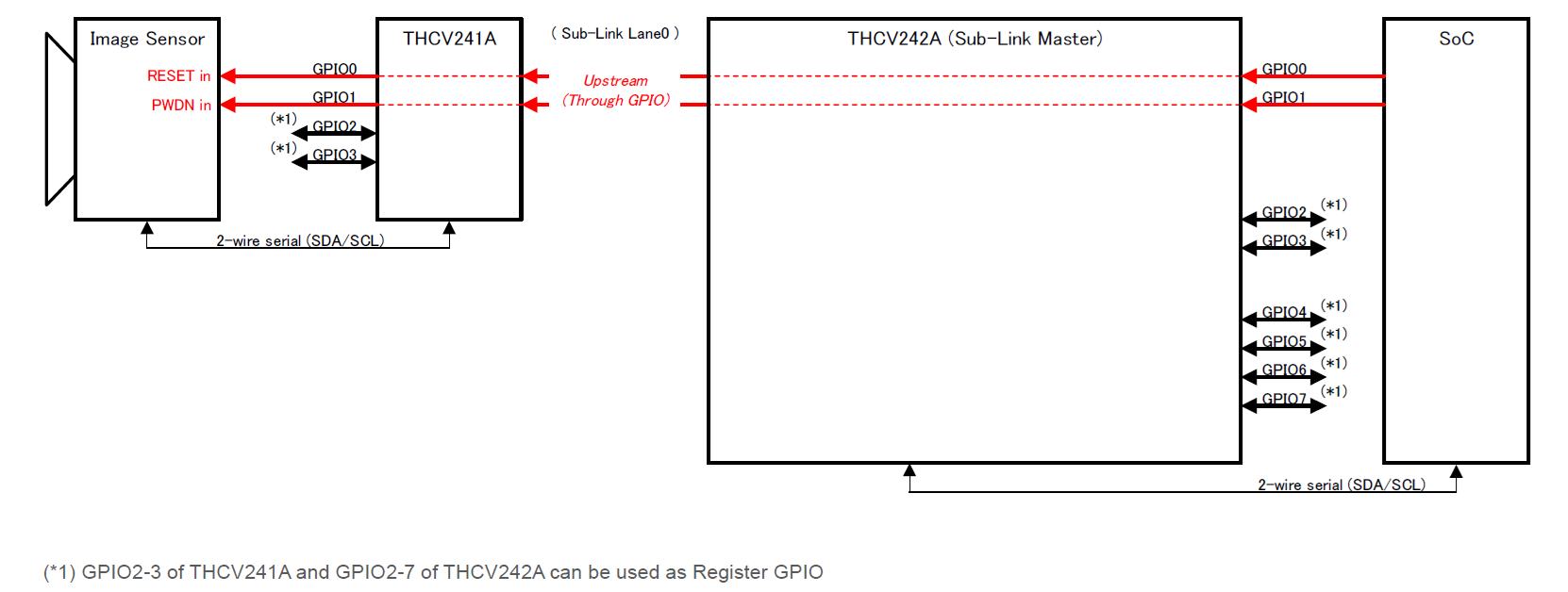
図2 Through GPIOのみでの構成例
そこで、Through GPIOでカバーできない制御を補うのがRegister GPIOである。Register GPIOは、SoCからI2Cバスを通じてレシーバICおよびトランスミッタICのレジスタを所望のタイミングで書き換えることで、希望する制御を実現するというものである(図3)。これによりThrough GPIOの制約を超えた、より複雑なシステム構成が組めるようになる。
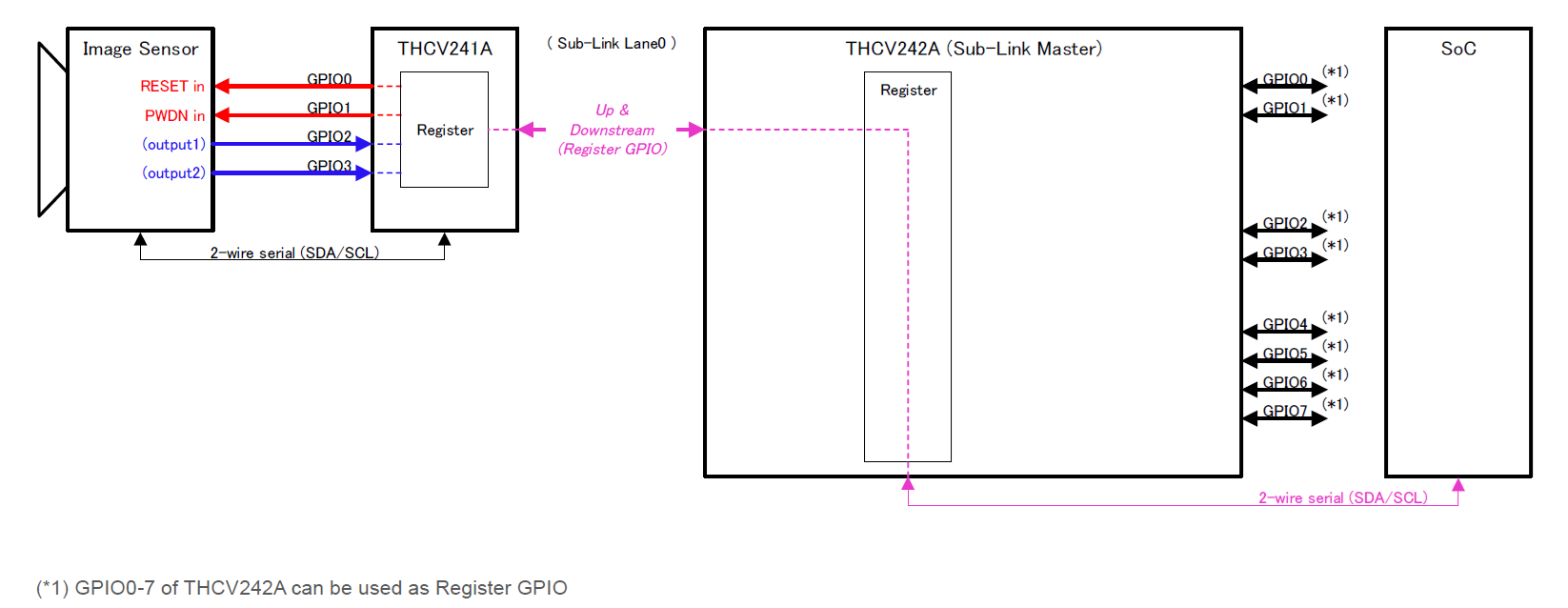
図3 Register GPIOを用いた制御例
しかしながら、Register GPIOにはThrough GPIOと比べて配慮を要する点が2点ある。1つは、SoCの制御ソフトウェアに対して新たにRegister GPIO制御のための仕様を加える必要があることだ。SoCのタイミングに応じてその都度、I2Cバス経由で各レジスタの内容を書き換えながらGPIO端子を制御しなければならない。もう1つは、リアルタイム性に劣ることである。レジスタを書き換え、その内容に応じてトランスミッタIC/レシーバICが動作するため、レイテンシー(遅延時間)が発生する。システム設計エンジニアは、Through GPIOとRegister GPIOそれぞれの制約と特性を考慮したうえでシステムを検討する必要がある。
EXTSYNC:複数のカメラを同期する
Sub-Linkに関するデザインガイドでは、その最後で「EXTSYNC」と呼ぶ機能について言及している(図4)。EXTSYNCは、ステレオ・カメラなど、2台のカメラ・モジュールとSoCの同期をとって動作させる場合に使用する機能である。実現方法は2つある。1つは、SoCで発生させた同期信号を、Through GPIOを用いて2台のカメラ・モジュールに分配する方法。もう1つは、レシーバICに内蔵したシンク・ジェネレータ(Sync Generator)で発生させた同期信号を、Through GPIOを使って2台のカメラ・モジュールに分配すると同時に、専用のEXTSYNC端子を介してSoCに送る方法である。どちらかの方法を使えば、同期したマルチ・カメラシステムなどを実現できる。
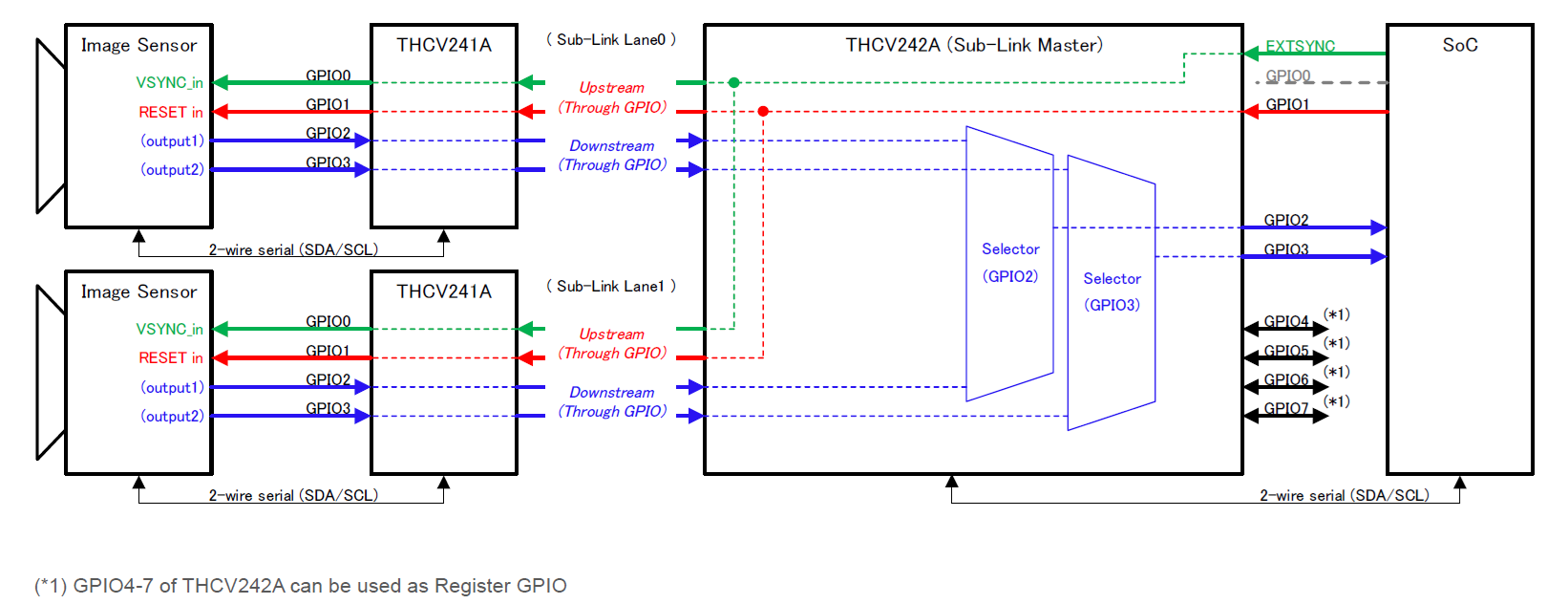
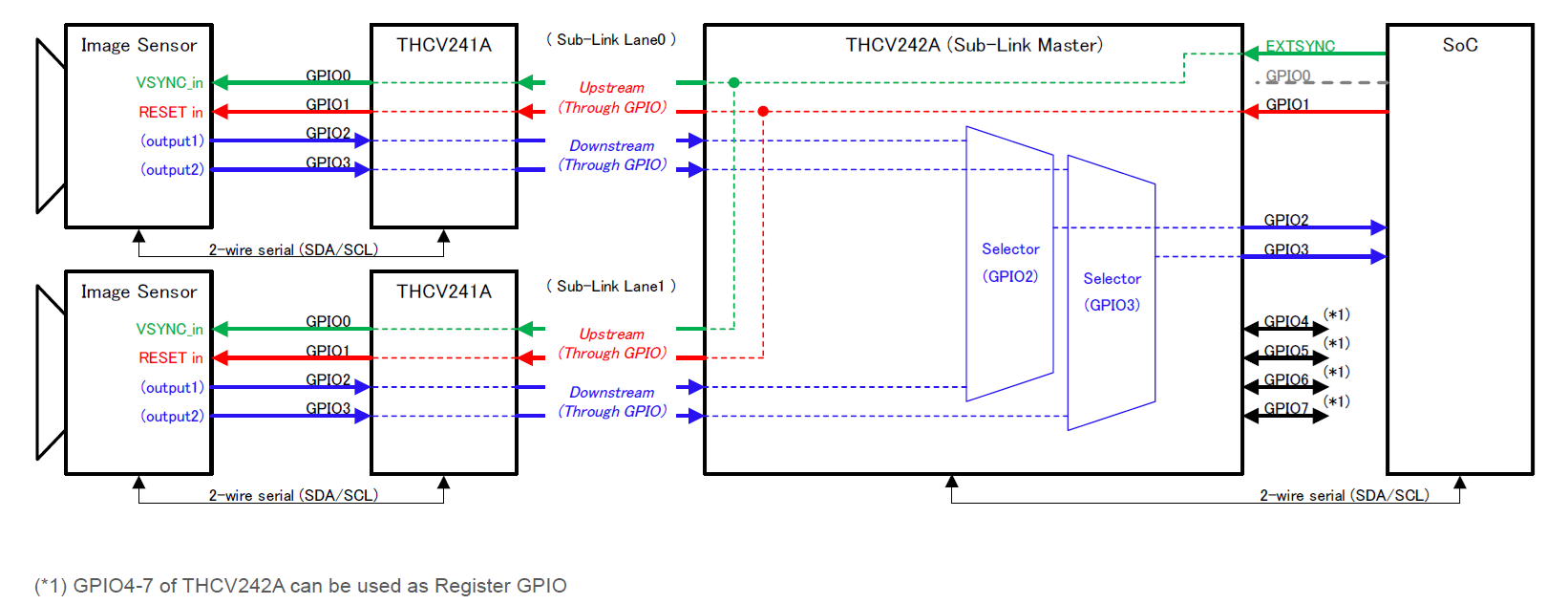
図4 EXTSYNC機能を用いた複数カメラ同期システムの実現
インターフェースそれ自体は付加価値にならない
前回のMain-Link編と合わせて、システムの検討に費やす時間と労力を軽減することを目的として用意した2つのデザインガイドを紹介した。カメラ・モジュールを搭載した電子機器にとって、インターフェースそれ自体は付加価値にはならない。2つのデザインガイドを活用することで節約できる時間や労力が、真の付加価値検討に活かされることを期待している。