![]()
THine Value MIPI 장거리 전송을 V-by-One HS로 구현. 카메라용 SerDes 칩셋 선정이 쉬워진다 (Sub-Link편)
2022.08.22
- 기사
- 사례
지난번에는 Main-Link에 대한 디자인 가이드를 소개하였는데, 이번에는 제어신호를 전송하는Sub-Link에 대한 디자인 가이드를 상세하게 소개한다.
Sub-Link란 무엇인가?
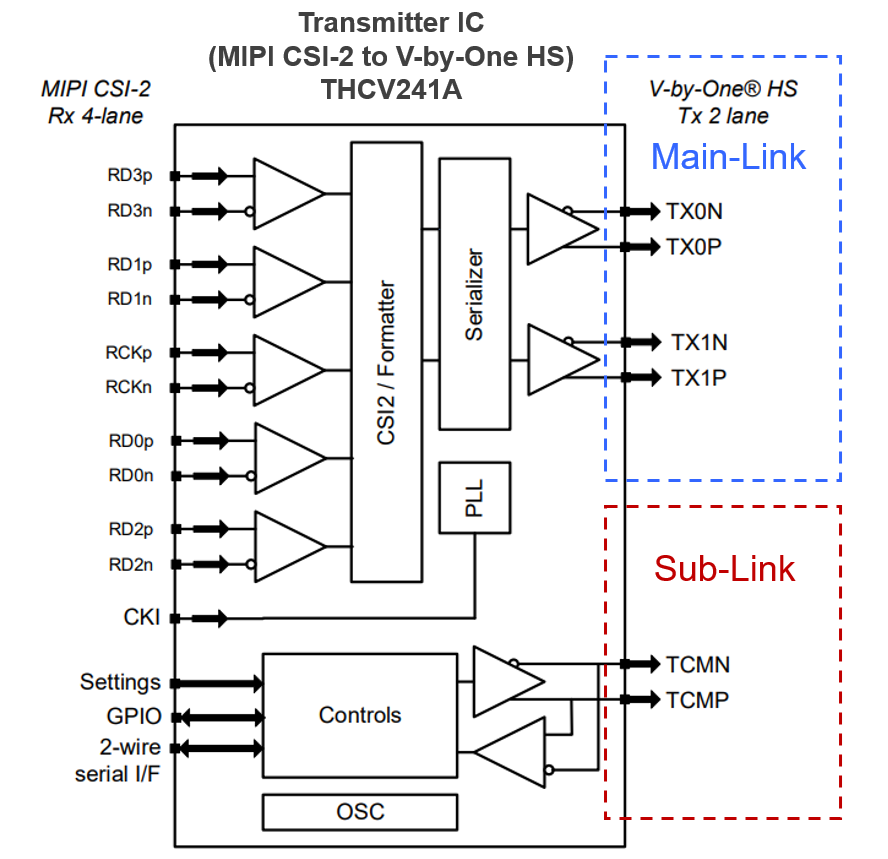
Sub-Link에 대한 구체적인 소개에 앞서, V-by-One® HS 대응 트랜스미터 IC 「THCV241A」를 예를들은 Main-Link와 Sub-Link의 개요를 각각 정리하려고 한다(그림1). 「THCV241A」는 카메라모듈에서 출력되는 MIPI® CSI-2신호를 V-by-One HS신호로 변환해주는 IC로서, Main-Link는 V-by-One HS신호 그 자체를 전송하는 경로를 말한다. 한편, 「THCV241A」는 그외에도 I2C와 GPIO(범용입출력 신호)의 제어신호 인터페이스를 갖고있으며, 그 신호들을 트랜스미터 IC와 리시버 IC사이에서 서로 주고 받을때 이용되는 경로가 Sub-Link이다. Sub-Link기능을 이용하면, 트랜스미터 IC와 리시버 IC를 통한 화상 데이터뿐만 아니라, SoC로부터의 카메라 모듈 전원을 차단시켜 주거나, 리셋을 걸어주거나, LED를 점등시켜주는것과 같은 다양한 시스템 구현이 가능 해진다.
뿐만아니라, Sub-Link의 기능을 이용할때에는 Sub-Link도 Main-Link와 같이 리시버 IC와 접속 할 필요가 있다.
뿐만아니라, Sub-Link의 기능을 이용할때에는 Sub-Link도 Main-Link와 같이 리시버 IC와 접속 할 필요가 있다.
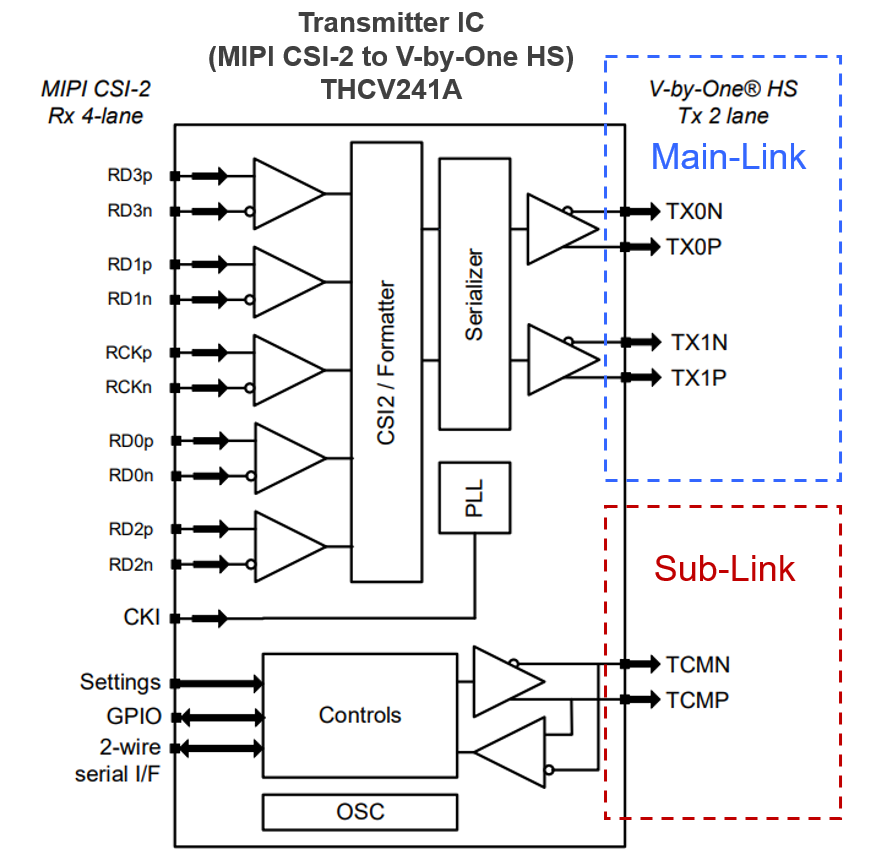
그림1 트랜스미터 IC THCV241A 블럭도
Sub-Link:Through GPIO와 Register GPIO를 자유자재로 이용
위에서 언급한대로, Sub-Link를 통한 I2C나 GPIO신호등을 주고 받는것이 가능해지지만, 그 GPIO의 제어방식에는 Through GPIO와 Register GPIO의 2가지가 있다. 전자기기 메이커(유저)는, 이 2가지 제어방식을 자유자재로 이용하여 최적의 시스템을 검토해야만 한다.
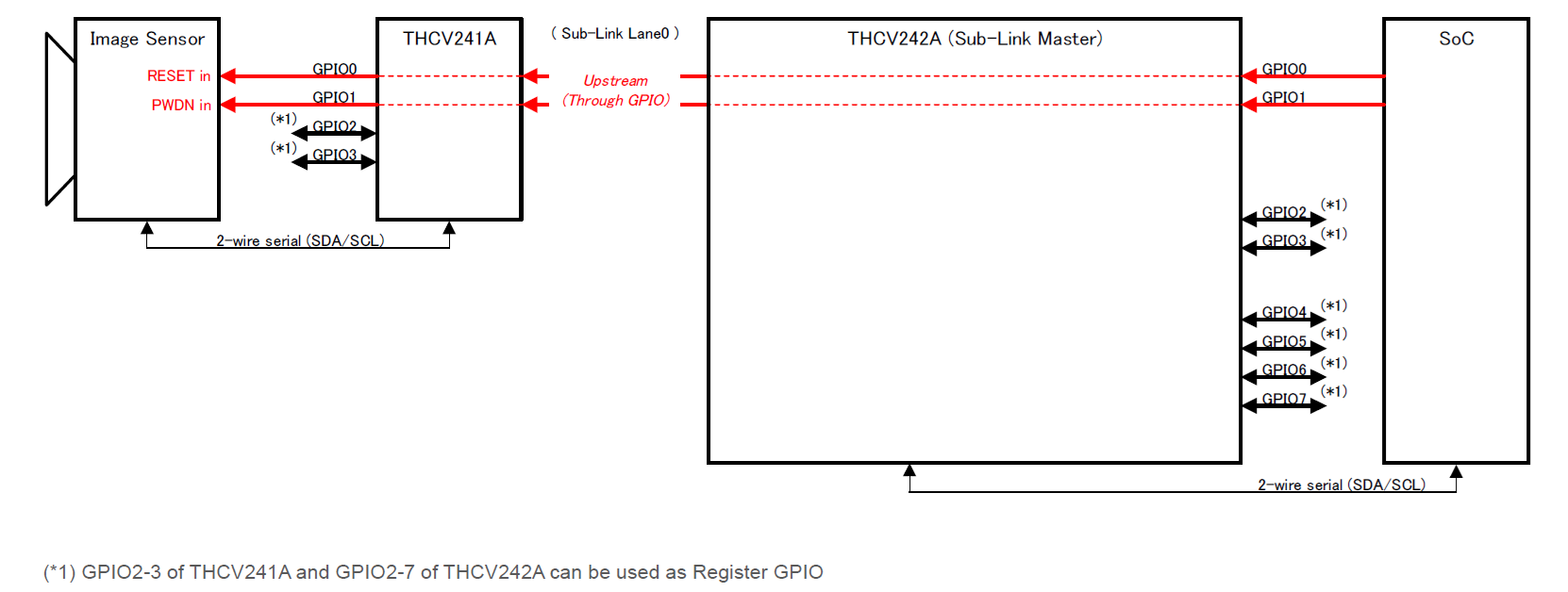
우선, Through GPIO는 카메라 모듈과 SoC사이에 들어가는 트랜스미터 IC와 리시버 IC가 마치 존재하지 않는것처럼 통과 시킨후 SoC에서 카메라 모듈을 직접 제어를 하는 방식이다. 이로인해 SoC설정을 바꾸지 않고, 장거리 전송에 대응할수 있다 라는 메리트가 있다.
또한, 트랜스미터 IC와 리시버 IC는 단순히 통과만 시키고, SoC에서 카메라 모듈을 리얼 타이밍으로 제어하는것이 가능하다.
하지만, 「THCV241A」와「THCV242A」조합에서는, Through GPIO로서 이용할수 있는 GPIO단자는 최대 4라인(GPIO0、GPIO1、GPIO2、GPIO3)그리고 업스트림과 다운스트림은 각각 2라인 이라는 제약이 있다(그림2). 이로인해, 접속하는 카메라 모듈의 개수가 늘어나는등, GPIO단자를 통한 제어요소가 늘어나게 되면, Through GPIO만으로는 제어가 곤란해지는 케이스가 발생한다.
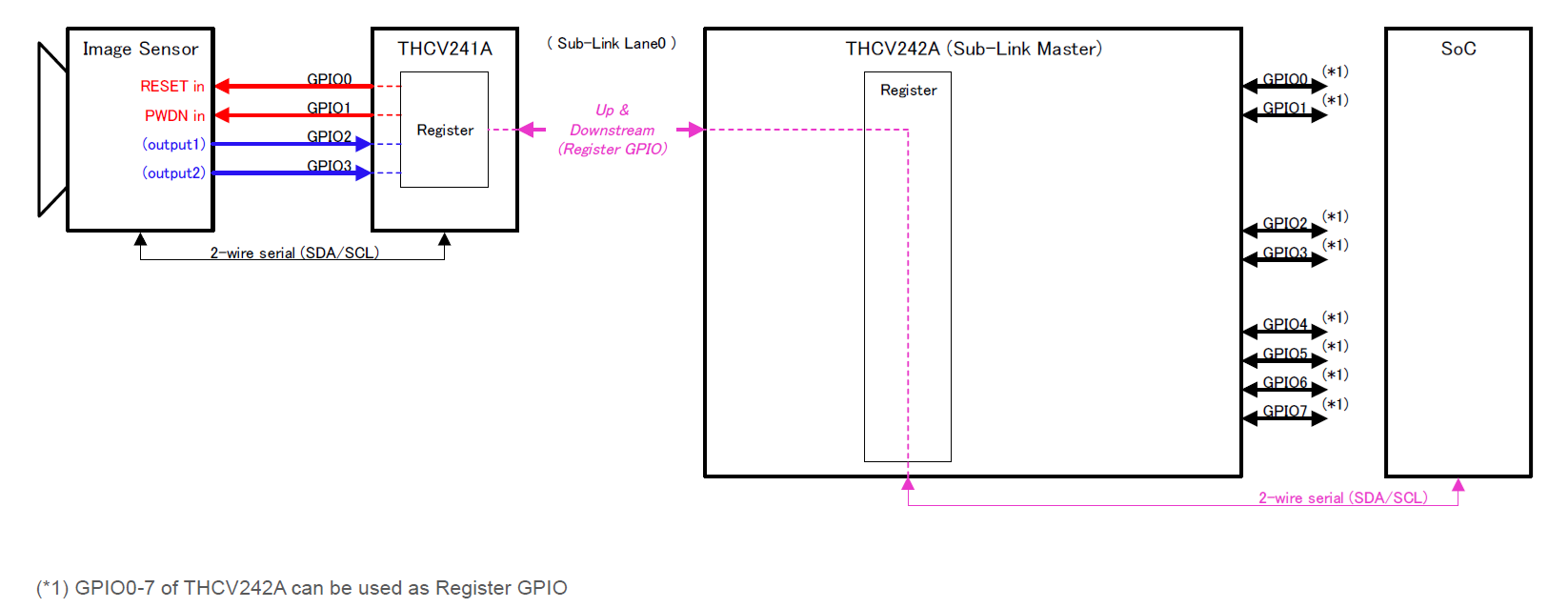
Through GPIO에서 커버할수 없는 제어를 보완한것이 Register GPIO이다. Register GPIO는, SoC에서 I2C를 통해 리시버 IC 및 트랜스미터 IC의 레지스터를 희망하는 타이밍에 바꿔 써넣음으로서, 희망하는 제어를 실현할수 있다는 것이다(그림3)
이러한것으로 Through GPIO의 제약을 넘었다 라기 보다, 복잡한 시스템 구성이 가능해졌다 라고 볼수있다.
하지만, Register GPIO에는 Through GPIO와 비교했을때 2가지 배려할 점이 있다. 한가지는 SoC의 제어 소프트웨어에 대해서 새로운 Register GPIO제어를 위한 사양을 추가할 필요가 있다 라는것이다. SoC의 타이밍에 맞게 그때 그때 I2C 경유해서 각 레지스터의 내용을 바꾸어 써넣으면서 GPIO단자를 제어하지 않으면 안된다. 또 한가지는, 리얼 타이밍이 좀 떨어진다는것이다. 레지스터를 바꿔 써넣고, 그 내용에 맞는 트랜스미터 IC/리시버 IC가 동작하기 때문에 Latency(지연시간)가 발생한다. 시스템 설계 엔지니어는, Through GPIO와 Register GPIO 각각의 제어와 특성을 고려한후에 시스템을 검토 할 필요가 있다.
우선, Through GPIO는 카메라 모듈과 SoC사이에 들어가는 트랜스미터 IC와 리시버 IC가 마치 존재하지 않는것처럼 통과 시킨후 SoC에서 카메라 모듈을 직접 제어를 하는 방식이다. 이로인해 SoC설정을 바꾸지 않고, 장거리 전송에 대응할수 있다 라는 메리트가 있다.
또한, 트랜스미터 IC와 리시버 IC는 단순히 통과만 시키고, SoC에서 카메라 모듈을 리얼 타이밍으로 제어하는것이 가능하다.
하지만, 「THCV241A」와「THCV242A」조합에서는, Through GPIO로서 이용할수 있는 GPIO단자는 최대 4라인(GPIO0、GPIO1、GPIO2、GPIO3)그리고 업스트림과 다운스트림은 각각 2라인 이라는 제약이 있다(그림2). 이로인해, 접속하는 카메라 모듈의 개수가 늘어나는등, GPIO단자를 통한 제어요소가 늘어나게 되면, Through GPIO만으로는 제어가 곤란해지는 케이스가 발생한다.
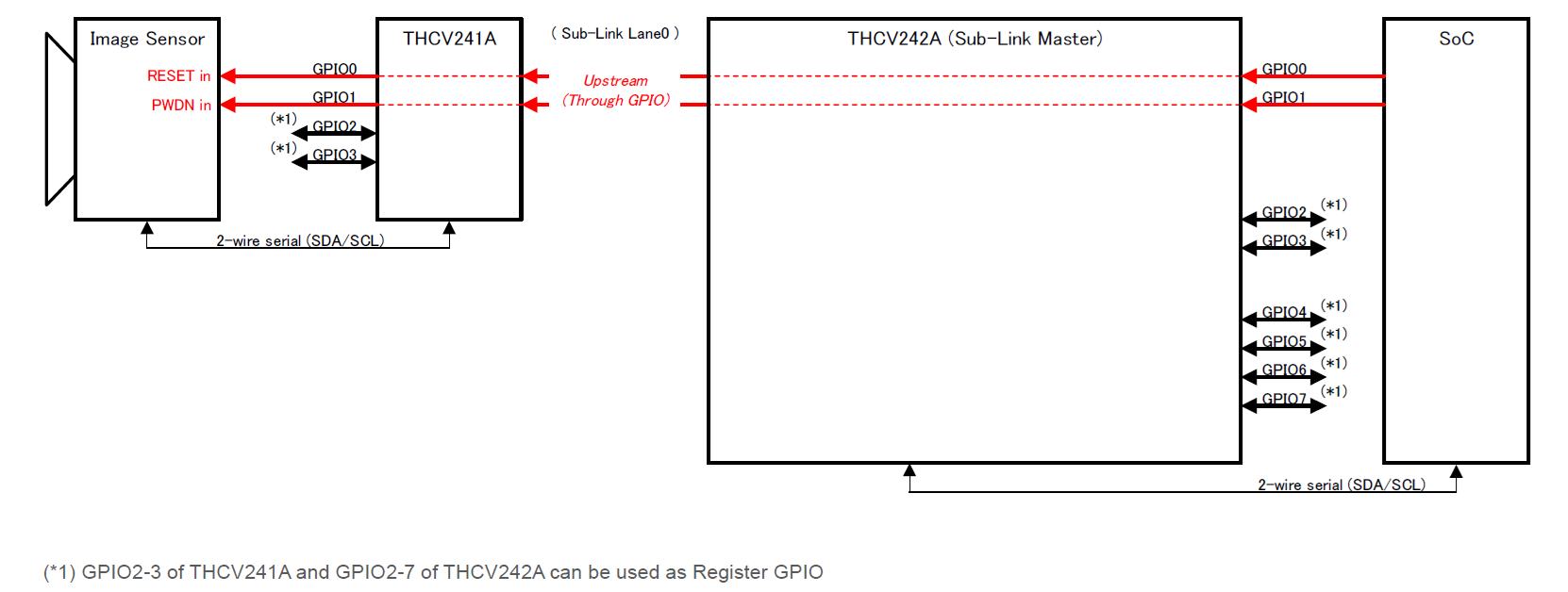
그림2 Through GPIO만으로 구성한 예
Through GPIO에서 커버할수 없는 제어를 보완한것이 Register GPIO이다. Register GPIO는, SoC에서 I2C를 통해 리시버 IC 및 트랜스미터 IC의 레지스터를 희망하는 타이밍에 바꿔 써넣음으로서, 희망하는 제어를 실현할수 있다는 것이다(그림3)
이러한것으로 Through GPIO의 제약을 넘었다 라기 보다, 복잡한 시스템 구성이 가능해졌다 라고 볼수있다.
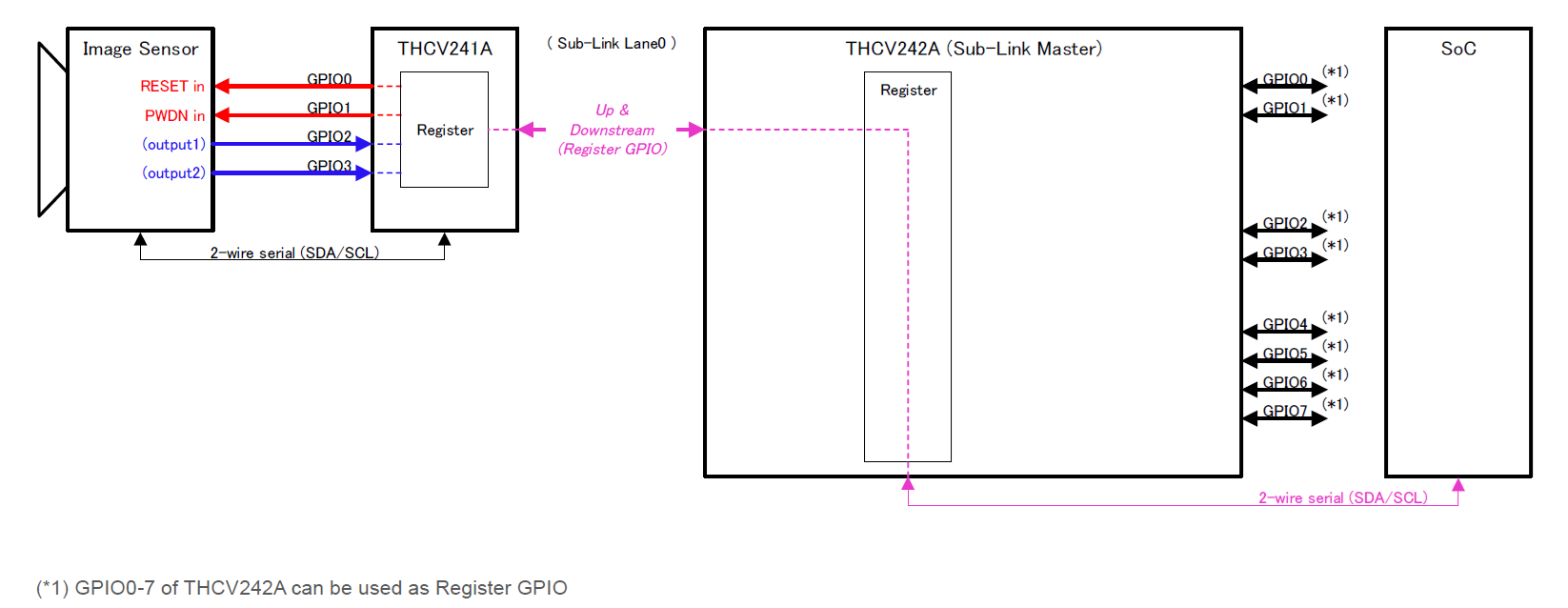
그림3 Register GPIO를 이용한 제어예
하지만, Register GPIO에는 Through GPIO와 비교했을때 2가지 배려할 점이 있다. 한가지는 SoC의 제어 소프트웨어에 대해서 새로운 Register GPIO제어를 위한 사양을 추가할 필요가 있다 라는것이다. SoC의 타이밍에 맞게 그때 그때 I2C 경유해서 각 레지스터의 내용을 바꾸어 써넣으면서 GPIO단자를 제어하지 않으면 안된다. 또 한가지는, 리얼 타이밍이 좀 떨어진다는것이다. 레지스터를 바꿔 써넣고, 그 내용에 맞는 트랜스미터 IC/리시버 IC가 동작하기 때문에 Latency(지연시간)가 발생한다. 시스템 설계 엔지니어는, Through GPIO와 Register GPIO 각각의 제어와 특성을 고려한후에 시스템을 검토 할 필요가 있다.
EXTSYNC:복수의 카메라를 동기 시킨다
Sub-Link에 대한 디자인 가이드에서는, 그 마지막에 「EXTSYNC」라고 불리는 기능에 대해서 언급하고 있다(그림4) EXTSYNC는, 스테레오 카메라와 같은 2대의 카메라 모듈과 SoC의 동기를 맞춰서 동작시킬 경우에 사용하는 기능이다. 실현 방법은 2가지 이다. 한가지는, SoC에서 발생시킨 동기신호를 Through GPIO를 이용하여 2대의 카메라 모듈로 분배하는 방법. 또 한가지는, 리시버 IC에 내장한 싱크너레이터(Sync Generator)에서 발생시킨 동기신호를 Through GPIO를 이용하여 2대의 카메라 모듈에 분배하는 동시에 전용의 EXTSYNC단자를 통해 SoC로 보내는 방법이다. 어느쪽 방법이든 동기된 멀티 카메라 시스템을 실현할수 있다.
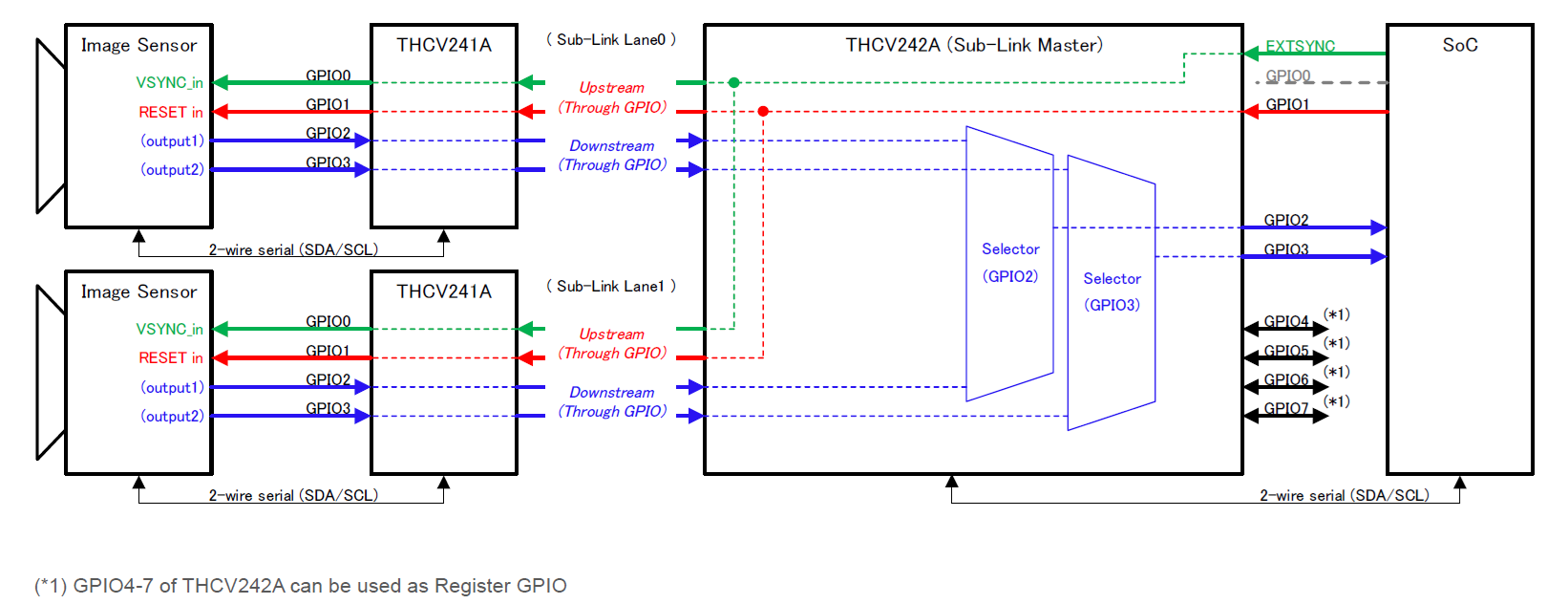
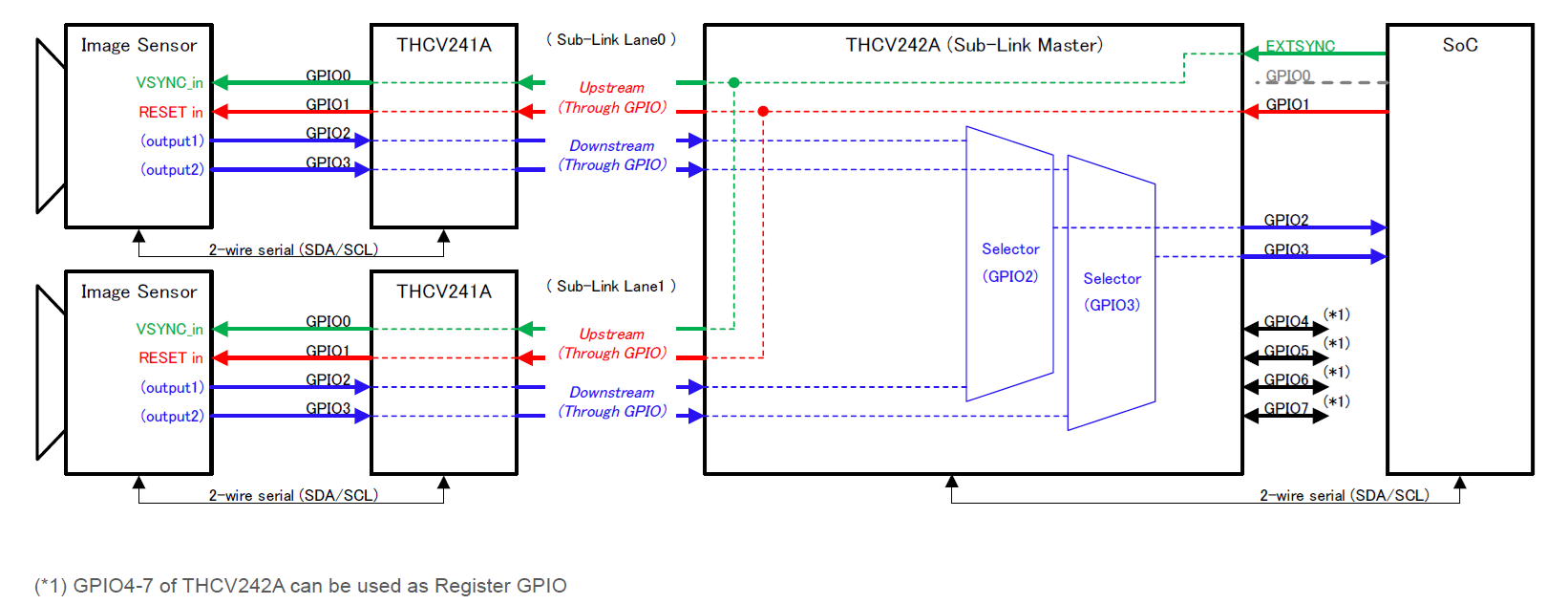
그림4 EXTSYNC기능을 이용한 복수 카메라 동기 시스템의 구현
인터페이스 그 자체는 부가가치가 될 수 없다.
지난번 Main-Link편과 같이, 시스템 검토에 소요되는 시간과 공수를 경감할 목적으로 준비한 2가지 디자인 가이드를 소개하였다.
카메라 모듈을 탑재한 전자기기에 인터페이스 그 자체는 부가가치가 될 수 없다. 2가지의 디자인 가이드를 활용함으로써, 절약되는 시간과 공수가 진정한 부가가치 검토에 활용될것을 기대하고 있다.
카메라 모듈을 탑재한 전자기기에 인터페이스 그 자체는 부가가치가 될 수 없다. 2가지의 디자인 가이드를 활용함으로써, 절약되는 시간과 공수가 진정한 부가가치 검토에 활용될것을 기대하고 있다.