![]()
THine Value 信号ラインの課題解決に向けた「IOHA:B」、その魅力を伝えるロボットアーム・デモの開発に挑戦
2024.02.01
- 記事
- コラム
FA機器や医療機器、セキュリティ機器、輸送機器などの産業用途向け電子機器の設計/開発の現場では、信号ラインに関する困り事が少なくない。例えば、「製造装置の配置が変わったため、信号ラインの伝送距離を延ばしたい」「ケーブルの取り回しを簡単にするため、信号ラインを細く軽くしたい」「遠く離れた場所を監視するため、映像信号を光伝送化したい」「防塵や防滴が求められるため無線伝送化したい」などである。恐らく、こうした困り事を解決する方法は複数あるだろう。そうした選択肢の中で最も素早く、しかも簡単に解決できる手法として注目を集めているのが当社の「IOHA:B」(アイオーハブ)である。
IOHA:Bは、機器間やボード間をつなぐパラレル形式の信号ラインを、2ペアの差動ラインに置き換える半導体チップ(シリアル・トランシーバIC)だ(図1)。30本を超えるパラレル形式の信号ラインでも、わずか2ペアの差動ライン(4本の信号ライン)に置き換えられる。このため、伝送距離を延ばしたり、信号ラインを細くしたり、軽くしたりすることを簡単に実現できる。さらに、無線通信モジュールを接続すれば無線伝送に、光伝送モジュールを接続すれば光伝送にすることも可能だ。
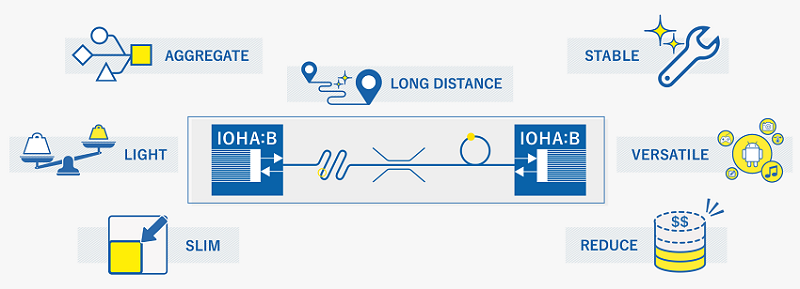
IOHA:Bは、機器間やボード間をつなぐパラレル形式の信号ラインを、2ペアの差動ラインに置き換える半導体チップ(シリアル・トランシーバIC)だ(図1)。30本を超えるパラレル形式の信号ラインでも、わずか2ペアの差動ライン(4本の信号ライン)に置き換えられる。このため、伝送距離を延ばしたり、信号ラインを細くしたり、軽くしたりすることを簡単に実現できる。さらに、無線通信モジュールを接続すれば無線伝送に、光伝送モジュールを接続すれば光伝送にすることも可能だ。
図1 「IOHA:B」コンセプト
ロボットアームを使った派手なデモ
素早く簡単に活用できる上に、得られる効果が大きいIOHA:B。この半導体チップを、信号ラインの困り事を抱える数多くのエンジニアに知ってもらいたい。
そこで2023年4月末に、その年の新入社員である茅野に対して、OJTのチューターから1つの課題が与えられた。課題とは、「潜在的なユーザーに対して、IOHA:Bの魅力を存分に伝えられるデモを開発せよ」というものだった。しかも、開発期限は決められていた。同年10月末に開催される展示会でデモを披露しなければならない。つまり、開発期間はわずか半年だった。
この短い期間で、どのようなデモを作り上げればいいのか。チューターからの具体的な指示は特にない。つまり、デモの内容から自らが考え出さなければならなかった。さまざまな検討を行った結果、最終的に落ち着いたのは、派手な動きを来場者に見てもらうため、ロボットアームを活用するデモだった。「ロボットアームは、インターネットなどを探し回った結果、レゴ社の『教育版レゴ・マインドストームEV3』が最適だと判断しました」。
この時点で茅野の頭の中に、すでにデモのイメージは明確に出来上がっていた。ロボットアーム側の基板と、それを制御するコントローラ側の基板の両方にIOHA:B(型番は「THCS253」)を置く。ロボットアームにはカメラ・モジュールやTOF(Time of Flight)センサ、加速度センサ、照度センサ、電流センサ、温度センサなどの各種センサを取り付けて、その出力をTHCS253で一度束ねてからコントローラに対してシリアル伝送する。送られてきた各種センサのデータは、ディスプレイに表示する。一方、コントローラでは、ロボットアームを動かす複数のモータの回転方向や速度などを制御する信号を生成する。それらをTHCS253で束ねてからロボットアームにシリアル伝送し、それによってロボットアームを動かすという仕組みである。
デモを披露する10月末は、ちょうどハロウィンの時期。ロボットアームでキャンディをつかんで来場者に渡す。それをキッカケにして、IOHA:Bをはじめ、さまざまな製品や技術の説明を聞いてもらうという構想までできていた。
そこで2023年4月末に、その年の新入社員である茅野に対して、OJTのチューターから1つの課題が与えられた。課題とは、「潜在的なユーザーに対して、IOHA:Bの魅力を存分に伝えられるデモを開発せよ」というものだった。しかも、開発期限は決められていた。同年10月末に開催される展示会でデモを披露しなければならない。つまり、開発期間はわずか半年だった。
この短い期間で、どのようなデモを作り上げればいいのか。チューターからの具体的な指示は特にない。つまり、デモの内容から自らが考え出さなければならなかった。さまざまな検討を行った結果、最終的に落ち着いたのは、派手な動きを来場者に見てもらうため、ロボットアームを活用するデモだった。「ロボットアームは、インターネットなどを探し回った結果、レゴ社の『教育版レゴ・マインドストームEV3』が最適だと判断しました」。
この時点で茅野の頭の中に、すでにデモのイメージは明確に出来上がっていた。ロボットアーム側の基板と、それを制御するコントローラ側の基板の両方にIOHA:B(型番は「THCS253」)を置く。ロボットアームにはカメラ・モジュールやTOF(Time of Flight)センサ、加速度センサ、照度センサ、電流センサ、温度センサなどの各種センサを取り付けて、その出力をTHCS253で一度束ねてからコントローラに対してシリアル伝送する。送られてきた各種センサのデータは、ディスプレイに表示する。一方、コントローラでは、ロボットアームを動かす複数のモータの回転方向や速度などを制御する信号を生成する。それらをTHCS253で束ねてからロボットアームにシリアル伝送し、それによってロボットアームを動かすという仕組みである。
デモを披露する10月末は、ちょうどハロウィンの時期。ロボットアームでキャンディをつかんで来場者に渡す。それをキッカケにして、IOHA:Bをはじめ、さまざまな製品や技術の説明を聞いてもらうという構想までできていた。
新入社員は天文学出身
茅野が考えたデモの構想は、非常に高い評価を受けた。IOHA:Bが持つ特徴を十分に伝えられるだけでなく、見た目にも興味を引く内容だったからだ。しかも、ロボットアームから連想される産業用ロボットは、IOHA:Bがターゲットとする有力な用途(アプリケーション)の1つだった。
開発/設計作業は7月上旬にスタート。しかし、茅野の心中は穏やかではなかった。なぜならば、3月までは筑波大学大学院に在籍し、天文学の研究に取り組んでいたため、電気/電子回路設計の経験もソフトウエア開発の経験も皆無だったからだ。
まず着手したのは、コントローラの設計である。社内にストックしてあったボード・コンピュータ「Raspberry Pi(ラズベリーパイ)」を使うことになったのだが、それを見るのも触るのも初めて。制御プログラムはPython言語を使って書くのだが、それについては大学の授業でかじったぐらいの知識しかなかった。それでも開発/設計の手は止められない。Raspberry PiもPythonもインターネットで調べて、数日後には何とかモータを回せるようになった。
オシロスコープも触ったことはなかった。これも独力で調べて使い方を習得し、信号波形の観測方法をマスター。オシロスコープの画面とにらめっこしながら、モータ駆動に向けたPWM信号の周波数とデューティ比を最適化し、スムーズなロボットアームの動きを実現することに成功した。
次の開発/設計作業は基板の設計である。着手したのは7月中旬ごろだ。基板は2枚必要である。1つは、コントローラ側の基板(Primary Board)。THCS253やスイッチングレギュレータICなどを実装する(図2)。もう1つは、ロボットアーム側に置く基板(Secondary Board)であり、THCS253やモータドライバIC、スイッチングレギュレータICなどを載せる。
この作業はとても大変だった。もちろん基板設計の経験はまったくなく、基板設計CADの使い方も一切分からない。このため何から手を付ければいいのかさえも見当がつかない。特に苦労したのは、バイパスコンデンサやフェライトビーズなどの扱いだ。そもそも、それぞれの電気/電子回路における役割を理解しづらい上に、どうやって回路定数を決めればいいのかもさっぱり分からなかったからだ。
そんな状況で頼りになったのは、ほかのエンジニアたちが設計した基板である。それを参考にして、自らの基板の設計作業を進めることにした。最も参考になったのは、THCS253の評価基板だ。搭載されている機能に若干の違いがあるため、すべてを真似することはできなかったが、かなりの部分を流用できた。さらに、採用したモータドライバICのアプリケーションノートに掲載されていた回路図とBOM(部品表)リストはとても役に立った。「モータドライバIC周辺の回路は、ほぼそのまま利用させていただきました」。
実際に回路図を書き始めたのは8月末である。「設計する基板が2枚あったので、この作業には大変苦労しました」。その後、外部企業に回路図から基板レイアウトを起こしてもらうため指示書を作成した。基板レイアウトの検図は9月26日に完了し、すぐに基板の製造を外部企業に委託した。もうこの時点で、デモを披露する展示会まで1カ月を切っていた。
開発/設計作業は7月上旬にスタート。しかし、茅野の心中は穏やかではなかった。なぜならば、3月までは筑波大学大学院に在籍し、天文学の研究に取り組んでいたため、電気/電子回路設計の経験もソフトウエア開発の経験も皆無だったからだ。
まず着手したのは、コントローラの設計である。社内にストックしてあったボード・コンピュータ「Raspberry Pi(ラズベリーパイ)」を使うことになったのだが、それを見るのも触るのも初めて。制御プログラムはPython言語を使って書くのだが、それについては大学の授業でかじったぐらいの知識しかなかった。それでも開発/設計の手は止められない。Raspberry PiもPythonもインターネットで調べて、数日後には何とかモータを回せるようになった。
オシロスコープも触ったことはなかった。これも独力で調べて使い方を習得し、信号波形の観測方法をマスター。オシロスコープの画面とにらめっこしながら、モータ駆動に向けたPWM信号の周波数とデューティ比を最適化し、スムーズなロボットアームの動きを実現することに成功した。
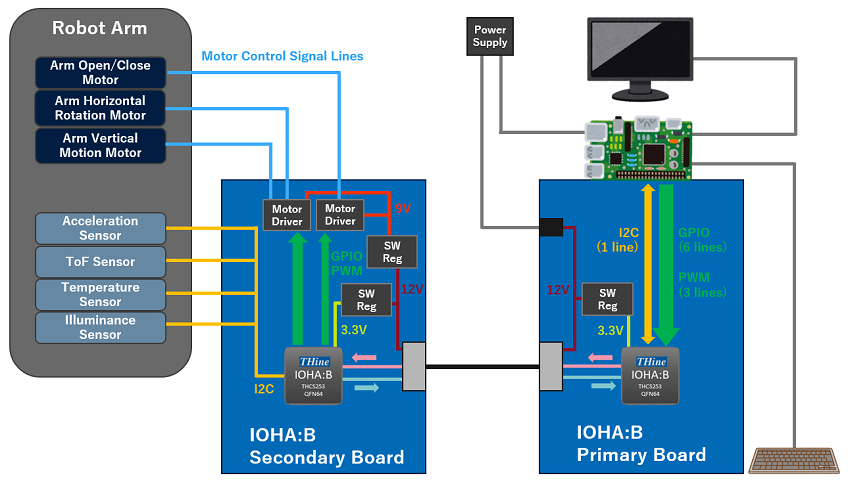
次の開発/設計作業は基板の設計である。着手したのは7月中旬ごろだ。基板は2枚必要である。1つは、コントローラ側の基板(Primary Board)。THCS253やスイッチングレギュレータICなどを実装する(図2)。もう1つは、ロボットアーム側に置く基板(Secondary Board)であり、THCS253やモータドライバIC、スイッチングレギュレータICなどを載せる。
図2 ロボットアームを使ったデモのブロック図
この作業はとても大変だった。もちろん基板設計の経験はまったくなく、基板設計CADの使い方も一切分からない。このため何から手を付ければいいのかさえも見当がつかない。特に苦労したのは、バイパスコンデンサやフェライトビーズなどの扱いだ。そもそも、それぞれの電気/電子回路における役割を理解しづらい上に、どうやって回路定数を決めればいいのかもさっぱり分からなかったからだ。
そんな状況で頼りになったのは、ほかのエンジニアたちが設計した基板である。それを参考にして、自らの基板の設計作業を進めることにした。最も参考になったのは、THCS253の評価基板だ。搭載されている機能に若干の違いがあるため、すべてを真似することはできなかったが、かなりの部分を流用できた。さらに、採用したモータドライバICのアプリケーションノートに掲載されていた回路図とBOM(部品表)リストはとても役に立った。「モータドライバIC周辺の回路は、ほぼそのまま利用させていただきました」。
実際に回路図を書き始めたのは8月末である。「設計する基板が2枚あったので、この作業には大変苦労しました」。その後、外部企業に回路図から基板レイアウトを起こしてもらうため指示書を作成した。基板レイアウトの検図は9月26日に完了し、すぐに基板の製造を外部企業に委託した。もうこの時点で、デモを披露する展示会まで1カ月を切っていた。
残り3週間なのに電源が入らない
茅野の手元に、完成した2枚の基板が届いたのは10月6日だった。早速、動かしてみる。ところが、まったく動かない。正確に言えば、電源が入らないのだ。展示会まで、あと3週間もない。これには茅野もチューターもさすがに焦った。
動かない原因は、複数の設計ミスにあった。そこで急いで、設計ミスを1つずつつぶしていく作業に取り掛かる。まずは電源が入らないという不具合の原因は、結線のミスにあることが判明した。もう基板を作り直す時間はない。そこでケーブル側を改造することで対処した。
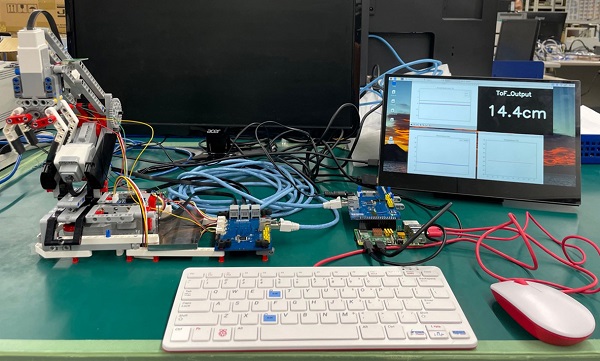
これでようやく電源が入るようになった。次に、さまざまな機能の動作確認に取り掛かった。I2Cバスを介した各種センサのデータ通信は正常に動いていた。ところが、ロボットアームのモータがまったく動かない。コントローラからさまざまな制御信号を送っても、まったく反応がない。原因を探るべく、2枚の基板の配線をそれぞれ丁寧に調べていくと、モータドライバICとTHCS253を接続する配線にミスがあることが判明した。もちろん、基板を作り直す時間はないので、ジャンパー線を飛ばすことで修復することにした。これで基本的な機能の動作確認は完了した(図3)。10月20日のことだった。5日後に始まる展示会に何とか間に合わせることができた。
動かない原因は、複数の設計ミスにあった。そこで急いで、設計ミスを1つずつつぶしていく作業に取り掛かる。まずは電源が入らないという不具合の原因は、結線のミスにあることが判明した。もう基板を作り直す時間はない。そこでケーブル側を改造することで対処した。
これでようやく電源が入るようになった。次に、さまざまな機能の動作確認に取り掛かった。I2Cバスを介した各種センサのデータ通信は正常に動いていた。ところが、ロボットアームのモータがまったく動かない。コントローラからさまざまな制御信号を送っても、まったく反応がない。原因を探るべく、2枚の基板の配線をそれぞれ丁寧に調べていくと、モータドライバICとTHCS253を接続する配線にミスがあることが判明した。もちろん、基板を作り直す時間はないので、ジャンパー線を飛ばすことで修復することにした。これで基本的な機能の動作確認は完了した(図3)。10月20日のことだった。5日後に始まる展示会に何とか間に合わせることができた。
図3 試作したデモの全体像
半導体の世界で勝負する
「ロボットアームに触ってキャンディを受け取ってくれた人には、とても楽しんでもらえた様子で、IOHA:Bの説明にも耳を傾けてくれました」

図4 ロボットアーム展示の様子
展示会では、多くの来場者がザインエレクトロニクスのブースに足を運び、ロボットアームのデモなどを見学した(図4)。実際に、来場者に対するアンケートでは「興味深かった」との回答が80%を超え、非常に高い満足度を得ることに成功した。展示会の直前まで苦労した甲斐もあり、大きな成果を残せたわけだ。
茅野は、この展示会が終わった直後の11月1日に開発部へと配属された。そこですでに、半導体チップの設計や評価などの業務に取り組んでいる。半導体チップの設計や評価は、茅野が希望した仕事である。「日本の産業界は全体的に下り調子の局面ですが、半導体だけは違うと感じています。2022年には半導体不足の騒動が起こり、さらに最近になって国内に次々と新しい半導体工場が建設されています。そうした活気のある業界で頑張れば、きっと将来、楽しくて、価値のある仕事ができるはずです」。
茅野は、この展示会が終わった直後の11月1日に開発部へと配属された。そこですでに、半導体チップの設計や評価などの業務に取り組んでいる。半導体チップの設計や評価は、茅野が希望した仕事である。「日本の産業界は全体的に下り調子の局面ですが、半導体だけは違うと感じています。2022年には半導体不足の騒動が起こり、さらに最近になって国内に次々と新しい半導体工場が建設されています。そうした活気のある業界で頑張れば、きっと将来、楽しくて、価値のある仕事ができるはずです」。