![]()
THine Value 解決訊號線問題的「IOHA:B」,挑戰開發具吸引力的機械手臂展示
2024.02.01
- 文章
- 專欄
在FA設備、醫療設備、安全設備、交通設備等工業用電子設備的設計開發領域,訊號線存在許多問題。例如,「因為製造設備的配置發生了變化,希望延長訊號線的傳輸距離」,「想讓訊號線更細更輕,以便更容易佈線」,或「監控距離較遠,想要使用光纖傳輸」和「因為需要防塵和防水,想使用無線傳輸」。為解決這些問題可能有很多種方法。其中,敝公司的「IOHA:B」作為最快、最簡單的解決方案而備受矚目。
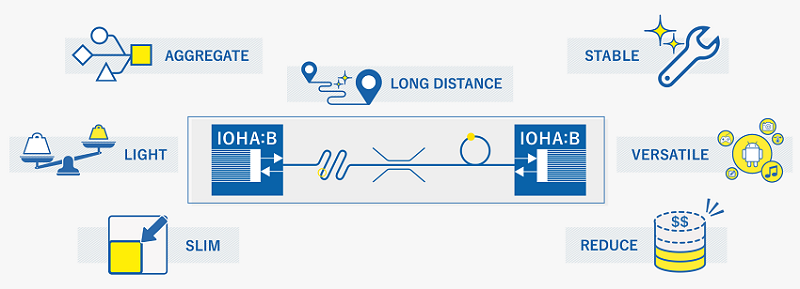
IOHA:B是一種半導體晶片(Serial Transceiver IC),它以兩對差分線取代了連接設備或電路板之間的Parallel訊號線(圖1)。只需2對差分線(4條訊號線)即可取代30多條Parallel訊號線。因此,可以輕鬆地延長傳輸距離、使訊號線更細、更輕。此外,還可以透過連接無線通訊模組來使用無線傳輸,也可以透過連接光傳輸模組來使用光傳輸。
IOHA:B是一種半導體晶片(Serial Transceiver IC),它以兩對差分線取代了連接設備或電路板之間的Parallel訊號線(圖1)。只需2對差分線(4條訊號線)即可取代30多條Parallel訊號線。因此,可以輕鬆地延長傳輸距離、使訊號線更細、更輕。此外,還可以透過連接無線通訊模組來使用無線傳輸,也可以透過連接光傳輸模組來使用光傳輸。
圖1 「IOHA:B」的概念
使用機械手臂進行引人注目的展示
IOHA:B使用上方便,並且有很好效果。我們想讓許多遇到訊號線問題的工程師了解這款半導體晶片。
因此在2023年4月底,當年的新進員工茅野被OJT導師分發了一個作業。面臨的挑戰是「開發一個demo,向潛在用戶充分傳達IOHA:B的吸引力。」並也設定了開發期限,demo必須在同年10月底舉行的展覽會上展示。也就是說,開發時間只僅有六個月。
在這麼短的時間內要製作出什麼樣的demo呢?導師沒有具體指示。也就是說他必須根據demo的內容提出自己的想法。經過多方討論,最終決定進行用機械手臂讓參觀者看到華麗動作的demo。「在網路上搜尋機器手臂後,我們認為樂高的『 LEGO・Mindstorms 教育版 EV3』 是最佳選擇。」
此時,茅野的腦海中已經清晰地浮現出展示的畫面。將IOHA:B(型號「THCS253」)放置在機器手臂端和控制它的控制器端上。機器手臂上裝有攝影機模組、TOF(Time of Flight)sensor、加速度sensor、亮度sensor、電流sensor、溫度sensor等各種感測器,它們的輸出由THCS253集成,然後serial傳輸到控制器。各個感測器發送的數據顯示在顯示器上。同時,控制器產生訊號來控制移動機器手臂的多個馬達的旋轉方向和速度。該系統是使用THCS253將它們集成並serial傳輸到機器手臂,使機器手臂移動的。
機器手臂展示活動於十月底舉行,正好遇上萬聖節。機器手臂抓取糖果並發送給參觀者。以此為契機,我們有了讓參觀者聆聽各種產品和技術說明的想法,其中包括IOHA:B。
因此在2023年4月底,當年的新進員工茅野被OJT導師分發了一個作業。面臨的挑戰是「開發一個demo,向潛在用戶充分傳達IOHA:B的吸引力。」並也設定了開發期限,demo必須在同年10月底舉行的展覽會上展示。也就是說,開發時間只僅有六個月。
在這麼短的時間內要製作出什麼樣的demo呢?導師沒有具體指示。也就是說他必須根據demo的內容提出自己的想法。經過多方討論,最終決定進行用機械手臂讓參觀者看到華麗動作的demo。「在網路上搜尋機器手臂後,我們認為樂高的『 LEGO・Mindstorms 教育版 EV3』 是最佳選擇。」
此時,茅野的腦海中已經清晰地浮現出展示的畫面。將IOHA:B(型號「THCS253」)放置在機器手臂端和控制它的控制器端上。機器手臂上裝有攝影機模組、TOF(Time of Flight)sensor、加速度sensor、亮度sensor、電流sensor、溫度sensor等各種感測器,它們的輸出由THCS253集成,然後serial傳輸到控制器。各個感測器發送的數據顯示在顯示器上。同時,控制器產生訊號來控制移動機器手臂的多個馬達的旋轉方向和速度。該系統是使用THCS253將它們集成並serial傳輸到機器手臂,使機器手臂移動的。
機器手臂展示活動於十月底舉行,正好遇上萬聖節。機器手臂抓取糖果並發送給參觀者。以此為契機,我們有了讓參觀者聆聽各種產品和技術說明的想法,其中包括IOHA:B。
有天文學背景的新進員工
茅野的demo構想得到了高度評價。 因為內容不僅充分傳達了IOHA:B的特徵,在視覺上也很有吸引力。而且與機械手臂相關的工業機器人是IOHA:B瞄準的極具前景的應用之一。
開發/設計工作於七月初開始。但茅野的內心卻並不平靜。因為直到3月份,他就讀筑波大學研究所,從事天文學研究,完全沒有電機/電子電路設計或軟體開發的經驗。開始著手進行的第一件事就是設計控制器。使用公司既有的Raspberry Pi電腦,但這是他第一次看到且接觸它。控制程式是用Python語言編寫的,他只有大學課堂上學到的知識,但是開發/設計的工作不能停止。於是他在網路上找了Raspberry Pi和Python的資料,幾天之後就讓馬達運作起來了。
他甚至從未接觸過示波器。自己研究並學會如何使用它,也掌握如何觀察訊號波形。他一邊盯著示波器螢幕,一邊優化了用於驅動馬達的PWM訊號的頻率和duty比,成功的讓機器手臂順利動作。
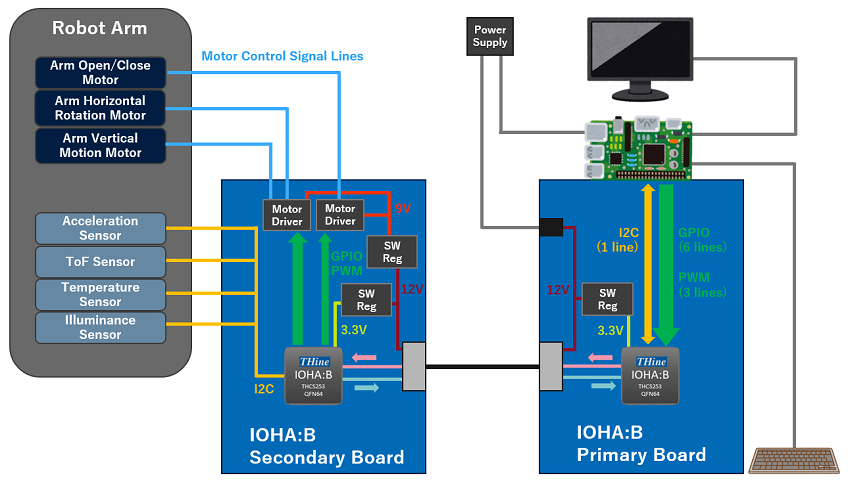
下一個開發/設計任務是設計電路板。大約是在七月中旬左右開始的。需要兩塊板子。第一個是控制器端的板子(Primary Board),放置THCS253、switching regulator IC等(圖2)。另一個是放置在機器人手臂端的Secondary Board,上面安裝了THCS253、馬達驅動器IC、switching regulator IC等。
這項工作相當困難。沒有電路板設計經驗,也不知道如何使用電路板設計CAD。所以不知道該從哪裡開始。尤其最困難的是處理Bypass capacitors 和Ferrite beads這些。他很難理解每個電機/電子電路的作用,而且也不清楚如何確定電路常數。
在這樣的情況下只能依賴其他工程師設計的電路板。他決定以THCS253評價板為參考,並繼續進行自己的電路板的設計工作。由於搭載的功能存在一些差異,無法模仿所有功能,但能夠採用其中的很大一部分。此外,馬達驅動器IC的application note中的電路圖和 BOM(物料清單)清單也非常有幫助。「馬達驅動器 IC周圍的電路幾乎按原樣使用。」
實際上是在八月底開始畫電路圖的。「這項任務非常困難,因為需要設計兩塊板子。」 之後,為外部公司製作了根據電路圖建立電路板設計的說明書。9月26日完成了電路板的檢驗,立即請外部公司製造電路板。此時,距離展示機械手臂的展覽會還剩不到一個月的時間。
開發/設計工作於七月初開始。但茅野的內心卻並不平靜。因為直到3月份,他就讀筑波大學研究所,從事天文學研究,完全沒有電機/電子電路設計或軟體開發的經驗。開始著手進行的第一件事就是設計控制器。使用公司既有的Raspberry Pi電腦,但這是他第一次看到且接觸它。控制程式是用Python語言編寫的,他只有大學課堂上學到的知識,但是開發/設計的工作不能停止。於是他在網路上找了Raspberry Pi和Python的資料,幾天之後就讓馬達運作起來了。
他甚至從未接觸過示波器。自己研究並學會如何使用它,也掌握如何觀察訊號波形。他一邊盯著示波器螢幕,一邊優化了用於驅動馬達的PWM訊號的頻率和duty比,成功的讓機器手臂順利動作。
下一個開發/設計任務是設計電路板。大約是在七月中旬左右開始的。需要兩塊板子。第一個是控制器端的板子(Primary Board),放置THCS253、switching regulator IC等(圖2)。另一個是放置在機器人手臂端的Secondary Board,上面安裝了THCS253、馬達驅動器IC、switching regulator IC等。
圖2 使用機械手臂進行展示的方塊圖
這項工作相當困難。沒有電路板設計經驗,也不知道如何使用電路板設計CAD。所以不知道該從哪裡開始。尤其最困難的是處理Bypass capacitors 和Ferrite beads這些。他很難理解每個電機/電子電路的作用,而且也不清楚如何確定電路常數。
在這樣的情況下只能依賴其他工程師設計的電路板。他決定以THCS253評價板為參考,並繼續進行自己的電路板的設計工作。由於搭載的功能存在一些差異,無法模仿所有功能,但能夠採用其中的很大一部分。此外,馬達驅動器IC的application note中的電路圖和 BOM(物料清單)清單也非常有幫助。「馬達驅動器 IC周圍的電路幾乎按原樣使用。」
實際上是在八月底開始畫電路圖的。「這項任務非常困難,因為需要設計兩塊板子。」 之後,為外部公司製作了根據電路圖建立電路板設計的說明書。9月26日完成了電路板的檢驗,立即請外部公司製造電路板。此時,距離展示機械手臂的展覽會還剩不到一個月的時間。
剩下3週時間電源仍無法開啟
兩塊完成的電路板於10月6日抵達茅野手上。立即嘗試移動它,但它根本無法動作。 正確來說是電源打不開。距離展覽會還有不到三週的時間,茅野和導師都對此感到焦慮。
它不起作用的原因是由於多個設計錯誤。於是他們迅速著手將設計錯誤一一消除。首先發現電源打不開的問題原因是接線錯誤。因為沒有時間再重作電路板了,解決方法是對電纜端進行改造。
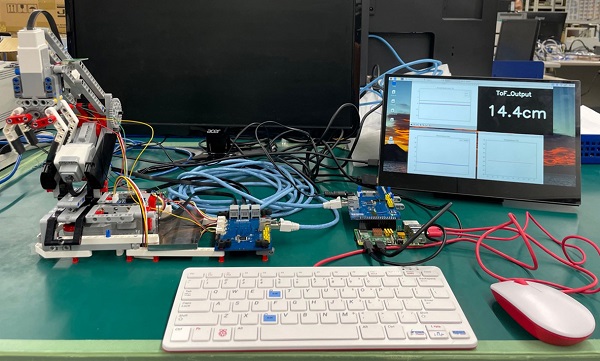
如此一來終於可以打開電源了。接下來,開始檢查各個功能的運作。各感測器之間透過I2C匯流排進行資料通訊正常。但,機器手臂的馬達根本不動。即使從控制器發出各種控制訊號,也完全沒有任何反應。當他們仔細檢查兩塊板上的接線查找原因時,他們發現馬達驅動IC和THCS253的接線有錯誤。這時也沒有時間重建電路板了,所以決定透過跳過跳線來修復它。在10月20日完成了基本功能運作的檢查(圖3)。他們設法趕上了還有5天就要開始的展覽會。
它不起作用的原因是由於多個設計錯誤。於是他們迅速著手將設計錯誤一一消除。首先發現電源打不開的問題原因是接線錯誤。因為沒有時間再重作電路板了,解決方法是對電纜端進行改造。
如此一來終於可以打開電源了。接下來,開始檢查各個功能的運作。各感測器之間透過I2C匯流排進行資料通訊正常。但,機器手臂的馬達根本不動。即使從控制器發出各種控制訊號,也完全沒有任何反應。當他們仔細檢查兩塊板上的接線查找原因時,他們發現馬達驅動IC和THCS253的接線有錯誤。這時也沒有時間重建電路板了,所以決定透過跳過跳線來修復它。在10月20日完成了基本功能運作的檢查(圖3)。他們設法趕上了還有5天就要開始的展覽會。
圖3 試作demo的整體圖
半導體世界的競爭
「觸摸機械手臂並收到糖果的人們似乎很開心,而且他們還聽了IOHA:B的說明。」

圖4 機械手臂展示
展覽會上許多參觀者參觀了THine Electronics的展位並觀看了機械手臂的demo(圖4)。 事實上,在對參觀者的調查中,超過80%的人回答說這次活動很有趣,達到了非常高的滿意度。展覽會之前付出的努力是值得的,我們得到了很好的成果。
茅野於11月1日展覽結束後立即被分配到開發部。在那裡,他們已經開始從事半導體晶片設計和評估等任務。
茅野於11月1日展覽結束後立即被分配到開發部。在那裡,他們已經開始從事半導體晶片設計和評估等任務。