![]()
THine Value 解决信号线问题的「IOHA:B」,挑战开发极富魅力的机械臂展示
2024.02.01
- 文章
- 专栏
在FA设备、医疗设备、安保设备、交通设备等工业用电子设备的设计开发现场,信号线相关的问题不在少数。例如「由于制造装置的配置发生了变化,需要延长信号线的传输距离」、「想让信号线更细更轻以方便布线」;或是「因监控距离较远,需要用光纤传输影像信号」和「因为需要防水防尘,想要使用无线传输」等。要解决这些问题方法可能有很多种。其中本公司的「IOHA:B」因为最简单快速能解决问题而备受瞩目。
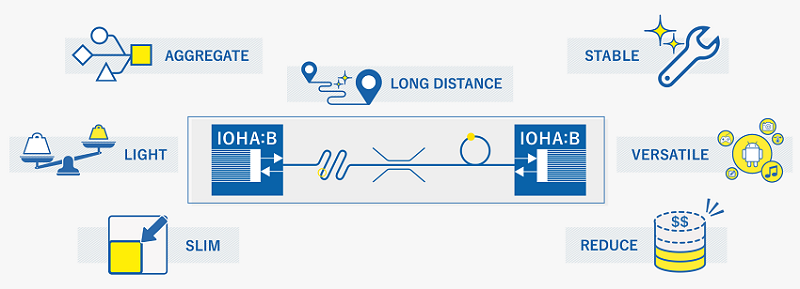
IOHA:B是一种半导体芯片(串行收发器IC),它以两对差动线取代了连接设备或电路板之间的并联形式的信号线(图1);也就是说它只需要2对差动线(4条信号线)即可取代30多条并联形式的信号线。因此可以轻松地延长传输距离、使信号线更细、更轻。此外,还可以通过连接无线通信模组来使用无线传输;或连接光纤传输模组来使用光纤传输。
IOHA:B是一种半导体芯片(串行收发器IC),它以两对差动线取代了连接设备或电路板之间的并联形式的信号线(图1);也就是说它只需要2对差动线(4条信号线)即可取代30多条并联形式的信号线。因此可以轻松地延长传输距离、使信号线更细、更轻。此外,还可以通过连接无线通信模组来使用无线传输;或连接光纤传输模组来使用光纤传输。
图1 「IOHA:B」的概念
使用机械臂的展示引人注目
IOHA:B使用方便并且效果好。所以我们想让更多遇到信号线问题的工程师了解这款半导体芯片。
因此在2023年4月底,当年的新进员工茅野被OJT导师分发了一个课题。这个课题是「开发并通过展示向潜在用户充分传达IOHA:B的吸引力。」并且也设定了开发期限--必须在同年10月底举行的展览会上展示,也就是说开发时间只有半年。
在这么短的时间内要制作出怎么样的展示呢?导师并没有具体指示,也就是说他必须自己考虑展示内容。经过多方讨论,最终决定进行机械臂的展示,以便为让参观者看到华丽的动作。「在网络上搜寻机械臂后,我们认为乐高的『 教育版LEGO Mindstorms EV3 』 是最佳选择。」
此时,茅野的脑海中已经清晰地浮现出展示的画面。将IOHA:B(型号「THCS253」)放置在机械臂的基板和控制它的控制器基板上。机械臂上装有相机模组、TOF(Time of Flight)传感器、加速度传感器、亮度传感器、电流传感器、温度传感器等各种传感器,它们的输出通过THCS253集成,然后串行传输到控制器上。各种传感器的数据显示在显示器上;同时,控制器上会生成能控制机械臂上的多个马达的旋转方向和速度的信号。这个系统是使用THCS253将这些信号集成并串行传输到机械臂上,来使机械臂移动的。
展示将于十月底进行,正好是万圣节期间。所以计划用机械臂抓取糖果并分发给参观者,以此为契机,让参观者有兴趣聆听包括IOHA:B在内的各种产品和技术的说明。
因此在2023年4月底,当年的新进员工茅野被OJT导师分发了一个课题。这个课题是「开发并通过展示向潜在用户充分传达IOHA:B的吸引力。」并且也设定了开发期限--必须在同年10月底举行的展览会上展示,也就是说开发时间只有半年。
在这么短的时间内要制作出怎么样的展示呢?导师并没有具体指示,也就是说他必须自己考虑展示内容。经过多方讨论,最终决定进行机械臂的展示,以便为让参观者看到华丽的动作。「在网络上搜寻机械臂后,我们认为乐高的『 教育版LEGO Mindstorms EV3 』 是最佳选择。」
此时,茅野的脑海中已经清晰地浮现出展示的画面。将IOHA:B(型号「THCS253」)放置在机械臂的基板和控制它的控制器基板上。机械臂上装有相机模组、TOF(Time of Flight)传感器、加速度传感器、亮度传感器、电流传感器、温度传感器等各种传感器,它们的输出通过THCS253集成,然后串行传输到控制器上。各种传感器的数据显示在显示器上;同时,控制器上会生成能控制机械臂上的多个马达的旋转方向和速度的信号。这个系统是使用THCS253将这些信号集成并串行传输到机械臂上,来使机械臂移动的。
展示将于十月底进行,正好是万圣节期间。所以计划用机械臂抓取糖果并分发给参观者,以此为契机,让参观者有兴趣聆听包括IOHA:B在内的各种产品和技术的说明。
新进员工有天文学背景
茅野的构思得到了高度评价。 因为这一构思不但能充分表现IOHA:B的特征,在视觉上也很有吸引力。而且从机械臂很容易联想到的工业机器人也是IOHA:B标准的极具前景的应用之一。
开发/设计工作于七月初开始,但茅野的內心却并不平静。因为直到3月份,他就读筑波大学研究生院,从事的还是天文学的研究,完全没有电机/电子回路设计或软件开发的经验。
他着手进行的第一件事就是控制器的设计,决定使用公司库存里的单板电脑「树莓派」,但这是他第一次看到且接触它。控制程序是用Python语言编写的,对他来说也只是在大学课堂上稍微学了一下的程度。但开发/设计工作不能停止。于是他在网络上找了树莓派和Python语言的资料,几天后总算可以开始运作起来了。
他也从未接触过示波器,但自己研究并学会了如何使用它,也掌握了如何观察信号波形。他一边盯着示波器屏幕,一边优化了用于马达驱动的PWM信号的频率和占空比,成功地让机械臂顺利动作。
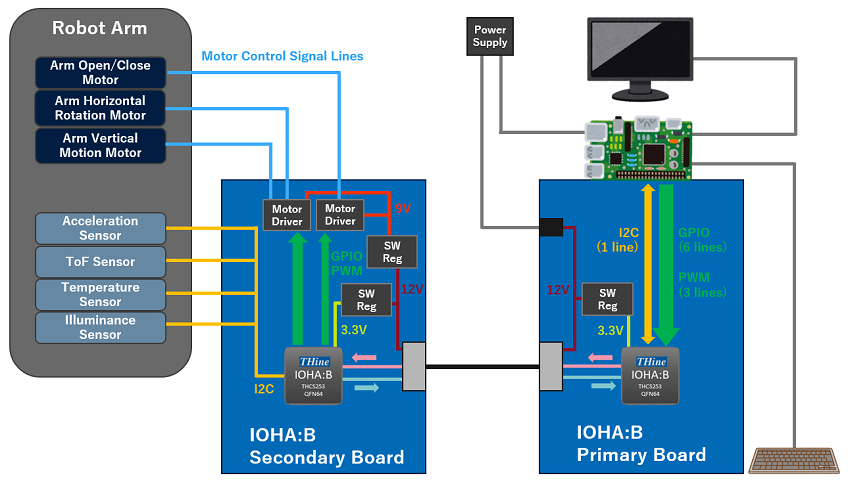
下一個开发/设计任务是设计电路板。大约是在七月中旬左右开始的,需要设计两块基板。一块是控制器基板(主板),装置有THCS253、开关稳压器IC等(图2)。另一块是放置在机械臂上的基板(次级板),装置有THCS253、马达驱动器IC、开关稳压器IC等。
这项工作相当困难。他没有电路基板设计经验,也不知道如何使用基板设计CAD,所以不知道如何着手。尤其最困难的是处理旁路电容器和铁氧体磁珠等。他很难理解每一个的电机/电子回路的作用,也不清楚如何确定电路常数。
在这样的情況下只能依赖其他工程师设计的电路基板,以此为参考进行自己的电路基板的设计。最能成为参考的就是THCS253的评价板。虽然由于装载的功能存在一定差异,无法模仿全部,但还是能采用其中很大一部分。另外,马达驱动器IC的应用说明中记载的电路图和 BOM(物料表)清单也非常有用。「马达驱动器IC周边的电路几乎是按原样使用的。」
实际开始画电路图已经是八月底了。「需要设计2块电路基板,这是非常困难的。」 那之后,为了让外包公司根据电路图进行基板排布制作了指示说明书。9月26日完成了电路基板排布的检验,并立即请外包公司制造基板。此时距离展示机械臂的展览会还剩不到一个月的时间。
开发/设计工作于七月初开始,但茅野的內心却并不平静。因为直到3月份,他就读筑波大学研究生院,从事的还是天文学的研究,完全没有电机/电子回路设计或软件开发的经验。
他着手进行的第一件事就是控制器的设计,决定使用公司库存里的单板电脑「树莓派」,但这是他第一次看到且接触它。控制程序是用Python语言编写的,对他来说也只是在大学课堂上稍微学了一下的程度。但开发/设计工作不能停止。于是他在网络上找了树莓派和Python语言的资料,几天后总算可以开始运作起来了。
他也从未接触过示波器,但自己研究并学会了如何使用它,也掌握了如何观察信号波形。他一边盯着示波器屏幕,一边优化了用于马达驱动的PWM信号的频率和占空比,成功地让机械臂顺利动作。
下一個开发/设计任务是设计电路板。大约是在七月中旬左右开始的,需要设计两块基板。一块是控制器基板(主板),装置有THCS253、开关稳压器IC等(图2)。另一块是放置在机械臂上的基板(次级板),装置有THCS253、马达驱动器IC、开关稳压器IC等。
图2 使用机械臂进行演示的模块图
这项工作相当困难。他没有电路基板设计经验,也不知道如何使用基板设计CAD,所以不知道如何着手。尤其最困难的是处理旁路电容器和铁氧体磁珠等。他很难理解每一个的电机/电子回路的作用,也不清楚如何确定电路常数。
在这样的情況下只能依赖其他工程师设计的电路基板,以此为参考进行自己的电路基板的设计。最能成为参考的就是THCS253的评价板。虽然由于装载的功能存在一定差异,无法模仿全部,但还是能采用其中很大一部分。另外,马达驱动器IC的应用说明中记载的电路图和 BOM(物料表)清单也非常有用。「马达驱动器IC周边的电路几乎是按原样使用的。」
实际开始画电路图已经是八月底了。「需要设计2块电路基板,这是非常困难的。」 那之后,为了让外包公司根据电路图进行基板排布制作了指示说明书。9月26日完成了电路基板排布的检验,并立即请外包公司制造基板。此时距离展示机械臂的展览会还剩不到一个月的时间。
剩余3周时间时电源仍无法开启
2块完成的电路基板于10月6日回到茅野手上。立即尝试了一下,但根本无法运作;确切地说是电源打不开。距离展览会还有不到3周的时间了,茅野和导师都不仅感到焦急。
无法运作的原因是因为有多个设计错误。于是他们迅速着手将设计错误一一消除。首先发现了电源打不开的原因是接线错误。但已经没有时间再重做电路基板了,解决方法是对电线进行改造。
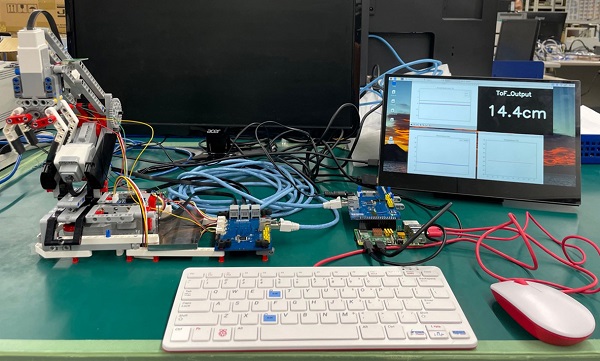
这样一来终于可以打开电源了。接下来开始检查各种功能的运作。各传感器之间通过I2C总线进行的数据通信运作正常,但机械臂的马达根本不动。即便从控制器发出各种控制信号也完全没反应。当他们仔细检查两块基板上的接线查找原因时,发现马达驱动器IC和THCS253的接线有错误。由于没有时间重做基板了,所以决定通过跳线来修复它。最后在10月20日完成了基本功能运作的检查(图3),总算赶上了5天后开始的展览会。
无法运作的原因是因为有多个设计错误。于是他们迅速着手将设计错误一一消除。首先发现了电源打不开的原因是接线错误。但已经没有时间再重做电路基板了,解决方法是对电线进行改造。
这样一来终于可以打开电源了。接下来开始检查各种功能的运作。各传感器之间通过I2C总线进行的数据通信运作正常,但机械臂的马达根本不动。即便从控制器发出各种控制信号也完全没反应。当他们仔细检查两块基板上的接线查找原因时,发现马达驱动器IC和THCS253的接线有错误。由于没有时间重做基板了,所以决定通过跳线来修复它。最后在10月20日完成了基本功能运作的检查(图3),总算赶上了5天后开始的展览会。
图3 试作展示的整体图
半导体世界的竞争
「接触机械臂并收到了糖果的人们很开心地听了IOHA:B的说明。」

图4 机械臂展示
展览会上许多参观者都来到THine Electronics的展位并观看了机械臂的展示(图4)。 实际在对参观者的问卷调差中,超过80%的人回答说这次展示很有趣,感到很满足。为了展览会付出的努力是值得的,也得到了很好的成果。
茅野于11月1日,展览会结束后立即被分配到开发部。在那里,他已经开始从事半导体芯片的设计与评估等业务,而这也是他希望从事的工作。「日本的产机业虽然在全面下滑,但只有半导体不一样。2022年的半导体供货不足造成了骚动,且最近国内也不断新建了半导体工厂。在这样充满活力的行业好好努力,将来一定能愉快地进行有价值的工作。」
茅野于11月1日,展览会结束后立即被分配到开发部。在那里,他已经开始从事半导体芯片的设计与评估等业务,而这也是他希望从事的工作。「日本的产机业虽然在全面下滑,但只有半导体不一样。2022年的半导体供货不足造成了骚动,且最近国内也不断新建了半导体工厂。在这样充满活力的行业好好努力,将来一定能愉快地进行有价值的工作。」