![]()
THine Value 신호라인의 과제 해결을 위한 'IOHA:B' 그 매력을 전달하는 로봇팔 데모 개발에 도전
2024.02.01
- NEW
- 기사
- 칼럼
FA기기, 의료기기, 보안기기, 운송기기 등 산업용 전자기기 설계/개발 현장에서는 신호라인에 대한 고민이 적지 않다. 예를 들어, '제조 장비의 배치가 바뀌어 신호 라인의 전송 거리를 늘리고 싶다', '케이블의 이동을 쉽게 하기 위해 신호 라인을 가늘고 가볍게 하고 싶다', '멀리 떨어진 곳을 감시하기 위해 영상 신호를 광전송하고 싶다', '방진, 방적 기능이 필요해 무선으로 전송하고 싶다' 등 다양한 고민이 있을 수 있다. 아마도 이러한 고민을 해결할 수 있는 방법은 여러 가지가 있을 것이다. 그 중 가장 빠르고 쉽게 해결할 수 있는 방법으로 주목받고 있는 것이 바로 당사의 'IOHA:B'(아이오허브)이다.
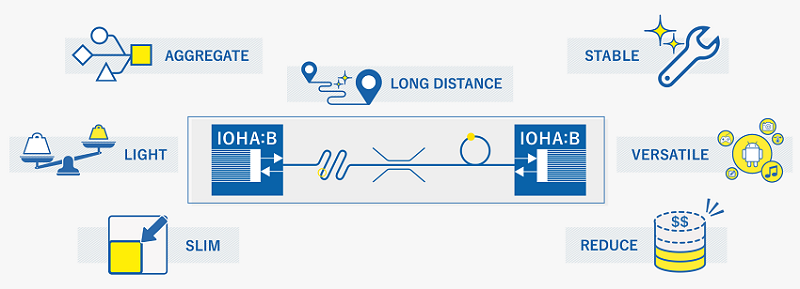
IOHA:B는 장비 간 또는 보드 간을 연결하는 병렬 형식의 신호선을 2쌍의 차동 라인으로 대체하는 반도체 칩(시리얼 트랜시버 IC)으로(그림 1), 30개가 넘는 병렬 형식의 신호선도 단 2쌍의 차동 라인(4개의 신호선)으로 대체할 수 있다. 따라서 전송 거리를 늘리거나 신호선을 가늘고 가볍게 하는 것을 쉽게 실현할 수 있다. 또한, 무선통신 모듈을 연결하면 무선 전송으로, 광전송 모듈을 연결하면 광전송으로 전환할 수 있다.
IOHA:B는 장비 간 또는 보드 간을 연결하는 병렬 형식의 신호선을 2쌍의 차동 라인으로 대체하는 반도체 칩(시리얼 트랜시버 IC)으로(그림 1), 30개가 넘는 병렬 형식의 신호선도 단 2쌍의 차동 라인(4개의 신호선)으로 대체할 수 있다. 따라서 전송 거리를 늘리거나 신호선을 가늘고 가볍게 하는 것을 쉽게 실현할 수 있다. 또한, 무선통신 모듈을 연결하면 무선 전송으로, 광전송 모듈을 연결하면 광전송으로 전환할 수 있다.
그림1 「IOHA:B」 개념
로봇 팔을 이용한 화려한 시연
쉽고 빠르게 활용할 수 있고, 효과가 큰 IOHA:B. 이 반도체 칩을 신호 라인에 어려움을 겪고 있는 많은 엔지니어들에게 알리고 싶다.
그래서 2023년 4월 말, 그 해의 신입사원인 치노에게 OJT 튜터로부터 하나의 과제가 주어졌다. 과제는 '잠재적 사용자에게 IOHA:B의 매력을 충분히 전달할 수 있는 데모를 개발하라'는 것이었다. 게다가 개발 기한도 정해져 있었다. 같은 해 10월 말 열리는 전시회에서 데모를 선보여야 한다. 즉, 개발 기간은 고작 6개월이었다.
이 짧은 기간 동안 어떤 데모를 만들어야 하는가. 튜터로부터 구체적인 지시는 없었다. 즉, 데모 내용을 보고 스스로 생각해내야 했다. 여러 가지를 고민한 끝에 최종적으로 결정한 것은 관람객들에게 화려한 움직임을 보여주기 위해 로봇팔을 활용한 데모였다. "로봇팔은 인터넷 등을 뒤져본 결과 레고사의 '교육용 레고 마인드스톰 EV3'가 가장 적합하다고 판단했다"고 말했다.
이 시점에서 치야노의 머릿속에는 이미 데모에 대한 이미지가 명확하게 그려져 있었다. 로봇 팔 쪽 기판과 이를 제어하는 컨트롤러 쪽 기판 모두에 IOHA:B(모델 번호는 'THCS253'이다)를 배치한다. 로봇 팔에는 카메라 모듈과 TOF(Time of Flight) 센서, 가속도 센서, 조도 센서, 전류 센서, 온도 센서 등 각종 센서를 장착하고 그 출력을 THCS253으로 한 번 묶은 후 컨트롤러에 시리얼로 전송한다. 전송된 각종 센서의 데이터는 디스플레이에 표시한다. 한편, 컨트롤러에서는 로봇 팔을 움직이는 여러 모터의 회전 방향과 속도 등을 제어하는 신호를 생성한다. 이를 THCS253에서 묶어서 로봇팔에 시리얼로 전송하고, 이를 통해 로봇팔을 움직이게 하는 구조다.
시연을 하는 10월말은 마침 할로윈 시즌이다. 로봇 팔로 사탕을 잡고 관람객에게 건네는 모습. 이를 계기로 IOHA:B를 비롯한 다양한 제품과 기술에 대한 설명을 듣게 하겠다는 구상까지 세웠다.
그래서 2023년 4월 말, 그 해의 신입사원인 치노에게 OJT 튜터로부터 하나의 과제가 주어졌다. 과제는 '잠재적 사용자에게 IOHA:B의 매력을 충분히 전달할 수 있는 데모를 개발하라'는 것이었다. 게다가 개발 기한도 정해져 있었다. 같은 해 10월 말 열리는 전시회에서 데모를 선보여야 한다. 즉, 개발 기간은 고작 6개월이었다.
이 짧은 기간 동안 어떤 데모를 만들어야 하는가. 튜터로부터 구체적인 지시는 없었다. 즉, 데모 내용을 보고 스스로 생각해내야 했다. 여러 가지를 고민한 끝에 최종적으로 결정한 것은 관람객들에게 화려한 움직임을 보여주기 위해 로봇팔을 활용한 데모였다. "로봇팔은 인터넷 등을 뒤져본 결과 레고사의 '교육용 레고 마인드스톰 EV3'가 가장 적합하다고 판단했다"고 말했다.
이 시점에서 치야노의 머릿속에는 이미 데모에 대한 이미지가 명확하게 그려져 있었다. 로봇 팔 쪽 기판과 이를 제어하는 컨트롤러 쪽 기판 모두에 IOHA:B(모델 번호는 'THCS253'이다)를 배치한다. 로봇 팔에는 카메라 모듈과 TOF(Time of Flight) 센서, 가속도 센서, 조도 센서, 전류 센서, 온도 센서 등 각종 센서를 장착하고 그 출력을 THCS253으로 한 번 묶은 후 컨트롤러에 시리얼로 전송한다. 전송된 각종 센서의 데이터는 디스플레이에 표시한다. 한편, 컨트롤러에서는 로봇 팔을 움직이는 여러 모터의 회전 방향과 속도 등을 제어하는 신호를 생성한다. 이를 THCS253에서 묶어서 로봇팔에 시리얼로 전송하고, 이를 통해 로봇팔을 움직이게 하는 구조다.
시연을 하는 10월말은 마침 할로윈 시즌이다. 로봇 팔로 사탕을 잡고 관람객에게 건네는 모습. 이를 계기로 IOHA:B를 비롯한 다양한 제품과 기술에 대한 설명을 듣게 하겠다는 구상까지 세웠다.
신입사원은 천문학과 출신
치노가 생각한 데모 컨셉은 IOHA:B의 특징을 충분히 전달할 수 있을 뿐만 아니라, 외형적으로도 흥미를 끌 수 있는 내용이었기 때문에 매우 높은 평가를 받았다. 게다가 로봇팔에서 연상되는 산업용 로봇은 IOHA:B가 타깃으로 삼는 유력한 용도(애플리케이션) 중 하나였다.
개발/설계 작업은 7월 초에 시작되었다. 하지만 치야노의 마음은 평온하지 않았다. 왜냐하면 3월까지 츠쿠바대학 대학원에 재학하며 천문학 연구에 몰두하고 있었기 때문에 전기/전자 회로 설계 경험도, 소프트웨어 개발 경험도 전혀 없었기 때문이다.
가장 먼저 시작한 것은 컨트롤러의 설계였다. 사내에 재고로 보유하고 있던 보드 컴퓨터 'Raspberry Pi(라즈베리파이)를 사용하게 되었는데, 이를 보는 것도, 만져보는 것도 처음이었다. 제어 프로그램은 파이썬 언어로 작성해야 하는데, 이에 대한 지식은 대학 수업에서 살짝 훑어본 정도에 불과했다. 그래도 개발/설계의 손길은 멈출 수 없었고, 라즈베리파이와 파이썬을 인터넷에서 찾아보고 며칠 만에 모터를 돌릴 수 있게 되었다.
오실로스코프도 만져본 적이 없었다. 이것도 혼자서 알아보고 사용법을 익혀 신호 파형을 관찰하는 방법을 터득했다. 오실로스코프 화면을 들여다보며 모터 구동을 위한 PWM 신호의 주파수와 듀티비를 최적화해 부드러운 로봇 팔의 움직임을 구현하는 데 성공했다.
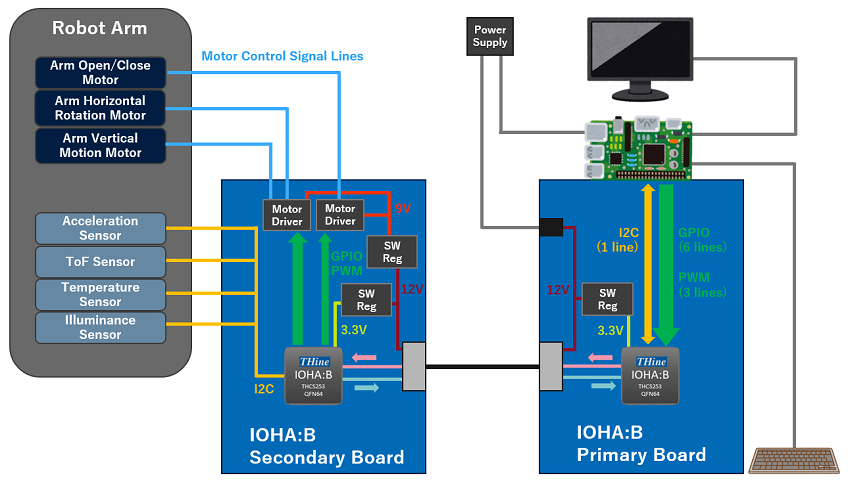
다음 개발/설계 작업은 기판 설계다. 7월 중순쯤에 착수했다. 기판은 두 장이 필요한데, 하나는 컨트롤러 쪽 기판(Primary Board)으로 THCS253과 스위칭 레귤레이터 IC 등을 실장한다(그림 2). 다른 하나는 로봇 암 쪽에 놓는 기판(Secondary Board)으로THCS253과 모터 드라이버 IC, 스위칭 레귤레이터 IC 등을 실장한다.
이 작업은 매우 힘들었다. 물론 기판 설계 경험이 전혀 없었고, 기판 설계 CAD 사용법도 전혀 몰랐다. 그래서 어디서부터 손을 대야 할지조차도 감이 잡히지 않았다. 특히 힘들었던 것은 바이패스 커패시터와 페라이트 비드 등을 다루는 것이었다. 애초에 각각의 전기/전자 회로에서 어떤 역할을 하는지 이해하기 어려웠고, 회로 상수를 어떻게 정해야 하는지도 전혀 몰랐기 때문이다.
그런 상황에서 의지할 수 있었던 것은 다른 엔지니어들이 설계한 기판이었다. 이를 참고해 자체 기판 설계 작업을 진행하기로 했다. 가장 참고한 것은 THCS253의 평가 기판이다. 탑재된 기능에 약간의 차이가 있어 모두 모방할 수는 없었지만, 상당 부분을 활용할 수 있었다. 또한, 채용한 모터 드라이버 IC의 애플리케이션 노트에 게재된 회로도와 BOM(부품 목록)도 큰 도움이 됐다. "모터 드라이버 IC 주변의 회로는 거의 그대로 활용했습니다."
실제로 회로도를 작성하기 시작한 것은 8월 말부터다. "설계할 기판이 두 개나 돼서 이 작업에 애를 많이 먹었다"고 한다. 이후 외부 업체에 회로도를 바탕으로 기판 레이아웃을 만들어 달라고 지시서를 작성했다. 기판 레이아웃 검도는 9월 26일에 완료했고, 곧바로 외부 업체에 기판 제작을 의뢰했다. 이쯤 되면 시연을 선보일 전시회까지 한 달이 채 남지 않은 시점이었다.
개발/설계 작업은 7월 초에 시작되었다. 하지만 치야노의 마음은 평온하지 않았다. 왜냐하면 3월까지 츠쿠바대학 대학원에 재학하며 천문학 연구에 몰두하고 있었기 때문에 전기/전자 회로 설계 경험도, 소프트웨어 개발 경험도 전혀 없었기 때문이다.
가장 먼저 시작한 것은 컨트롤러의 설계였다. 사내에 재고로 보유하고 있던 보드 컴퓨터 'Raspberry Pi(라즈베리파이)를 사용하게 되었는데, 이를 보는 것도, 만져보는 것도 처음이었다. 제어 프로그램은 파이썬 언어로 작성해야 하는데, 이에 대한 지식은 대학 수업에서 살짝 훑어본 정도에 불과했다. 그래도 개발/설계의 손길은 멈출 수 없었고, 라즈베리파이와 파이썬을 인터넷에서 찾아보고 며칠 만에 모터를 돌릴 수 있게 되었다.
오실로스코프도 만져본 적이 없었다. 이것도 혼자서 알아보고 사용법을 익혀 신호 파형을 관찰하는 방법을 터득했다. 오실로스코프 화면을 들여다보며 모터 구동을 위한 PWM 신호의 주파수와 듀티비를 최적화해 부드러운 로봇 팔의 움직임을 구현하는 데 성공했다.
다음 개발/설계 작업은 기판 설계다. 7월 중순쯤에 착수했다. 기판은 두 장이 필요한데, 하나는 컨트롤러 쪽 기판(Primary Board)으로 THCS253과 스위칭 레귤레이터 IC 등을 실장한다(그림 2). 다른 하나는 로봇 암 쪽에 놓는 기판(Secondary Board)으로THCS253과 모터 드라이버 IC, 스위칭 레귤레이터 IC 등을 실장한다.
그림2 로봇팔을 이용한 데모 블록도
이 작업은 매우 힘들었다. 물론 기판 설계 경험이 전혀 없었고, 기판 설계 CAD 사용법도 전혀 몰랐다. 그래서 어디서부터 손을 대야 할지조차도 감이 잡히지 않았다. 특히 힘들었던 것은 바이패스 커패시터와 페라이트 비드 등을 다루는 것이었다. 애초에 각각의 전기/전자 회로에서 어떤 역할을 하는지 이해하기 어려웠고, 회로 상수를 어떻게 정해야 하는지도 전혀 몰랐기 때문이다.
그런 상황에서 의지할 수 있었던 것은 다른 엔지니어들이 설계한 기판이었다. 이를 참고해 자체 기판 설계 작업을 진행하기로 했다. 가장 참고한 것은 THCS253의 평가 기판이다. 탑재된 기능에 약간의 차이가 있어 모두 모방할 수는 없었지만, 상당 부분을 활용할 수 있었다. 또한, 채용한 모터 드라이버 IC의 애플리케이션 노트에 게재된 회로도와 BOM(부품 목록)도 큰 도움이 됐다. "모터 드라이버 IC 주변의 회로는 거의 그대로 활용했습니다."
실제로 회로도를 작성하기 시작한 것은 8월 말부터다. "설계할 기판이 두 개나 돼서 이 작업에 애를 많이 먹었다"고 한다. 이후 외부 업체에 회로도를 바탕으로 기판 레이아웃을 만들어 달라고 지시서를 작성했다. 기판 레이아웃 검도는 9월 26일에 완료했고, 곧바로 외부 업체에 기판 제작을 의뢰했다. 이쯤 되면 시연을 선보일 전시회까지 한 달이 채 남지 않은 시점이었다.
3주 남았는데도 전원이 들어오지 않는다
치노의 손에 완성된 두 장의 기판이 도착한 것은 10월 6일이었다. 곧바로 움직여 보았다. 그런데 전혀 움직이지 않는다. 정확히 말하면 전원이 들어오지 않는 것이다. 전시회까지 3주밖에 남지 않았다. 이에 치노도 튜터도 역시 조바심이 났다.
움직이지 않는 원인은 여러 가지 설계 오류에 있었다. 그래서 서둘러 설계 오류를 하나하나 짚어내는 작업에 착수했다. 우선 전원이 들어오지 않는 고장의 원인은 결선 오류로 밝혀졌다. 더 이상 기판을 다시 만들 시간이 없다. 그래서 케이블 쪽을 개조하는 것으로 해결했다.
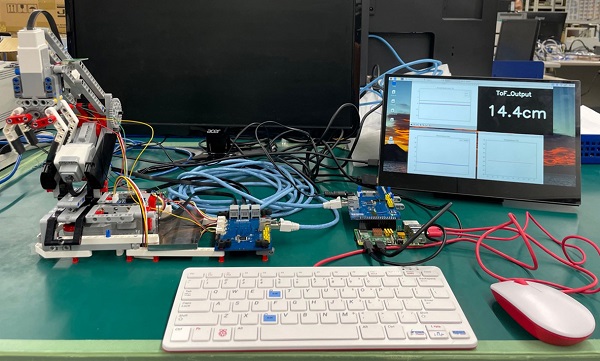
이제 드디어 전원이 들어오게 되었다. 다음으로는 각종 기능의 동작 확인에 들어갔다.2 C버스를 통한 각종 센서의 데이터 통신은 정상적으로 작동하고 있었다. 그런데 로봇팔의 모터가 전혀 움직이지 않는다. 컨트롤러에서 각종 제어 신호를 보내도 전혀 반응이 없다. 원인을 찾기 위해 두 장의 기판 배선을 각각 꼼꼼히 살펴본 결과, 모터 드라이버 IC와 THCS253을 연결하는 배선에 오류가 있는 것으로 밝혀졌다. 물론 기판을 다시 만들 시간이 없으므로 점퍼선을 건너뛰는 것으로 수리하기로 했다. 이로써 기본적인 기능의 동작 확인은 완료되었다(그림 3). 10월 20일이었는데, 5일 후에 열리는 전시회에 맞춰서 겨우겨우 출품할 수 있었다.
움직이지 않는 원인은 여러 가지 설계 오류에 있었다. 그래서 서둘러 설계 오류를 하나하나 짚어내는 작업에 착수했다. 우선 전원이 들어오지 않는 고장의 원인은 결선 오류로 밝혀졌다. 더 이상 기판을 다시 만들 시간이 없다. 그래서 케이블 쪽을 개조하는 것으로 해결했다.
이제 드디어 전원이 들어오게 되었다. 다음으로는 각종 기능의 동작 확인에 들어갔다.2 C버스를 통한 각종 센서의 데이터 통신은 정상적으로 작동하고 있었다. 그런데 로봇팔의 모터가 전혀 움직이지 않는다. 컨트롤러에서 각종 제어 신호를 보내도 전혀 반응이 없다. 원인을 찾기 위해 두 장의 기판 배선을 각각 꼼꼼히 살펴본 결과, 모터 드라이버 IC와 THCS253을 연결하는 배선에 오류가 있는 것으로 밝혀졌다. 물론 기판을 다시 만들 시간이 없으므로 점퍼선을 건너뛰는 것으로 수리하기로 했다. 이로써 기본적인 기능의 동작 확인은 완료되었다(그림 3). 10월 20일이었는데, 5일 후에 열리는 전시회에 맞춰서 겨우겨우 출품할 수 있었다.
그림3 시연한 데모 전체 모습
반도체의 세계에서 승부한다
"로봇 팔을 만져보고 사탕을 받은 사람들은 매우 즐거워하며 IOHA:B에 대한 설명에 귀를 기울여 주었습니다."

그림4 로봇팔 전시 모습
전시회에서는 많은 관람객들이 자인일렉트로닉스의 부스를 찾아 로봇팔 시연 등을 참관했다(그림 4). 실제로 관람객을 대상으로 한 설문조사에서 '흥미로웠다'는 응답이 80%를 넘어 매우 높은 만족도를 얻었다. 전시회 직전까지 고생한 보람도 있고, 큰 성과를 거둔 셈이다.
치노는 전시회가 끝난 직후인 11월 1일에 개발부로 발령받았다. 그곳에서 이미 반도체 칩의 설계와 평가 등의 업무를 하고 있다. 반도체 칩의 설계와 평가는 치노가 희망했던 업무다. "일본 산업계가 전반적으로 침체기에 접어들었지만, 반도체만은 다르다고 생각합니다. 2022년에는 반도체 부족 사태가 일어날 것이고, 최근 들어서는 국내에도 새로운 반도체 공장이 속속 건설되고 있습니다. 이런 활기찬 산업에서 열심히 일한다면, 앞으로 즐겁고 가치 있는 일을 할 수 있을 것"이라고 말했다.
치노는 전시회가 끝난 직후인 11월 1일에 개발부로 발령받았다. 그곳에서 이미 반도체 칩의 설계와 평가 등의 업무를 하고 있다. 반도체 칩의 설계와 평가는 치노가 희망했던 업무다. "일본 산업계가 전반적으로 침체기에 접어들었지만, 반도체만은 다르다고 생각합니다. 2022년에는 반도체 부족 사태가 일어날 것이고, 최근 들어서는 국내에도 새로운 반도체 공장이 속속 건설되고 있습니다. 이런 활기찬 산업에서 열심히 일한다면, 앞으로 즐겁고 가치 있는 일을 할 수 있을 것"이라고 말했다.